Resultate
Ergebnisse und Projektstand
Die folgende Seite präsentiert einige Ergebnisse und den aktuellen Stand des Systems (Stand September 2014):
- Hinderniserkennung und Kollisionsvermeidung mit Ultraschall & Infarot
- Gerichteter Flug und dynamische komplementäre Datenfusion optischer Sensoren
- Looping
- Autonomes Suchen, Zählen und Lokalisieren von Objekten
- Höhenregelung und autonome Landung
- Positionsregelug mit optischem Fluss
- Hinderniserkennung und Kollisionsvermeidung mit Ultraschall
Hinderniserkennung und Kollisionsvermeidung mit Ultraschall & Infarot

Mit Hilfe von Infrarot- & Ultraschallsensoren kann der Quadrocopter Hindernisse erkennen und Kollisionen vermeiden. Somit können auch Kollisionen mit Personen vermieden werden, was allein mit Utraschallsensoren nicht zuverlässig möglich ist, da die Schallwellen von Personen mit Kleidern nicht gut reflektiert werden.
Eine Besonderheit dieses Systems ist die Abstandsregelung. Das System benötigt weder ein aufwändiges kartenbasiertes Verfahren, um Kollisionen zu vermeiden, noch weicht es schlicht Hindernissen in die Gegenrichtigung aus, sondern hält statt dessen basierend auf der Abstandsmessung einen festgelegten minimalten Abstand zu Hindernissen ein. Somit wird aktiv der Abstand zu Hindernissen geregelt und ein autonomer Flug mit Hindernissen möglich.
Gerichteter Flug
Mit gerichtetem Flug ist die Fähigkeit gemeint, dass der Quadrocopter sich im autonomen Flug um die eigene Achse drehen kann. Dieses Gieren ist dann erforderlich, wenn der Quadrocopter eine Vorzugs- richtung hat, z.B. wenn nur an der Vorderseite bestimmte Sensoren befestigt sind. Dann kann der Quadrocopter durch Gieren die Sensoren in Flugrichtung ausrichten.
Während das Gieren bei Systemen mit anderer Sensorik, z.B. GPS, OTS oder Abstandssensoren wie Laser Scanner keine besondere Herausforderung darstellt, ist dies sehr wohl ein Problem, sofern ein optischer Flusssensor on-Board Verwendung findet, der nur Translationen messen kann. Dann führt das Gieren zu Fehlern.
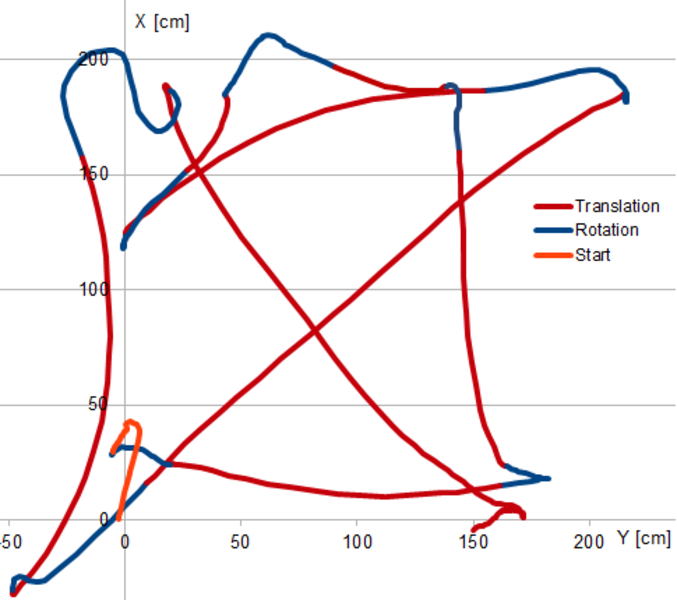
Um dieses Problem zu lösen wurde im Rahmen einer Bachelorarbeit ein zweites optisches Positionsbestimmungssystem unter Verwendung der Fourier Transformation, Fourier Tracking genannt, entwickelt. Im Rahmen eines Journal-Papers wurde das Fourier Tracking nun mit dem bisherigen Positionsbestimmungssystem verheiratet, so dass der Quadrocopter gerichtet fliegen kann. Das aktuelle System funktioniert aktuell so, dass der Fehler erst nach der Drehung korrigiert wird. Während der Drehung bewegt sich das System noch fälschlich. Da das Fourier Tracking robust gegenüber Helligkeitsänderungen ist, kann es auch bei schlechten und wechselnden Lichtverhältnissen genutzt werden.
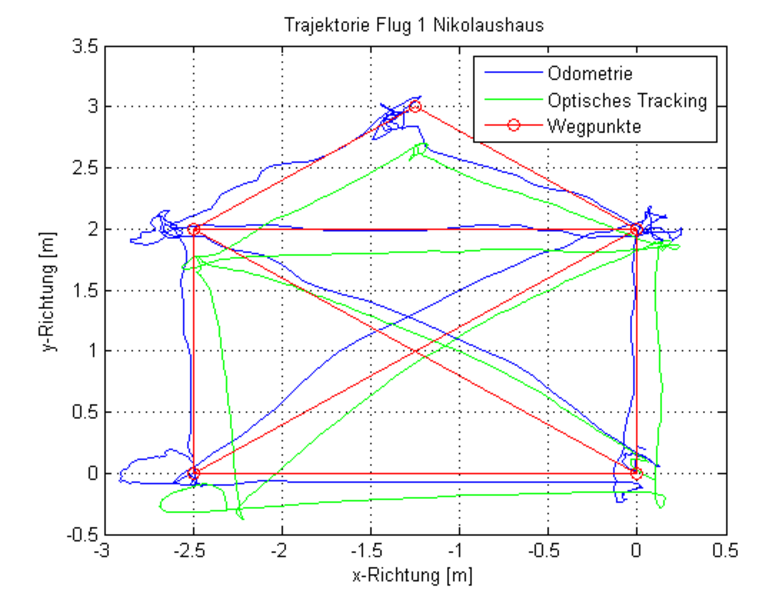
Das System operiert autonom, d.h. verwendet nur on-Board Sensorik und Rechenleistung. Das optische Trackingssystem dient hierbei lediglich der Evaluierung. Im ersten Video fliegt der Quadcopter ein Nikolaushaus gerichtet ab, im zweiten Video hält er seine Position bei wechselnden Lichtverhältnissen.
Looping
Der Quadrocopter kann im Flug per Knopfdruck automatisch ein Looping durchführen.
Autonomes Suchen und Zählen
Im Rahmen eines auf der UAV World 2013 vorgestellten Konferenzpapers wurde das hier am Lehrstuhl entwickelte System weitergeführt: Unser Quadrocopter wurde in die Lage versetzt, ein Objekt autonom zu suchen sowie multiple Objekte zu zählen und zu lokalisieren. Dabei operiert der Quadrocopter im vorgegebenen Testbereich vollkommen autonom, d.h. ohne zu Hilfenahme jeglicher externer Referenzsysteme oder Benutzereingriffe. Der Drohne werden die Parameter Suchbereich, Suchstrategie und Sichtbereich übergeben und diese generiert daraus eine Wegpunktliste und fliegt diese autonom ab. Die Drohne scannt auf diese Weise iterativ die Oberfläche des gesamten Suchbereichs mit ihrer nach unten gerichteten Kamera ab (siehe Bild rechts). Erkennt der Quadrocopter ein Zielobjekt, so wird dieses der Liste der gefundenen Ziele (Targets) hinzugefügt, sofern sich an dieser Stelle nicht bereits ein Objekt befindet. Auf diese Weise wird eine Mehrfacherkennung des selben Objekts ausgeschlossen. Wir haben in dem Paper untersucht, welche Auswirkungen die relevanten Suchparameter auf das Suchergebnis haben. Resultat der Suche ist eine "Schatzkarte" mit den gefunden Targets (Bilder unten). In diesem Fall sind das rote Bälle, die im Raum ausgelegt waren. Diese Arbeit ist Teil des Projekts AQopterI8 und "Lebensretter mit Propellern", das vom Universitätsbund Würzburg gefördert wird. Hintergrund ist die Suche nach Verletzten, z.B. in einem Feuerwehreinsatz. Wir arbeiten auch daran Personen statt Bälle zu suchen, wenngleich nicht die Bildverarbeitung sondern die Autonomie Schwerpunkt unserer Forschung ist.


Hoehenregelung und autonome Landung
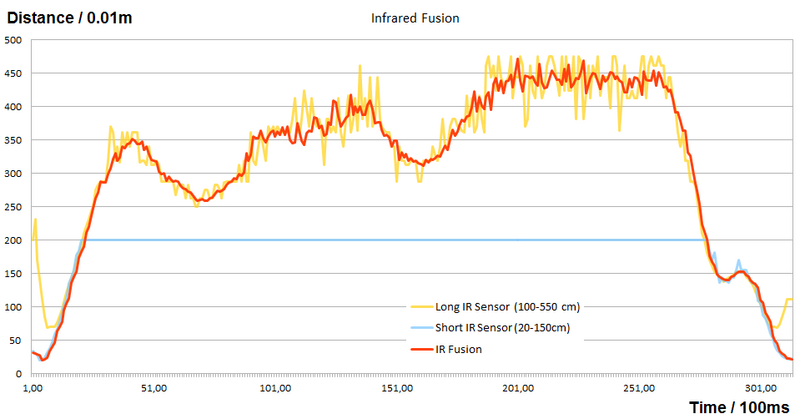
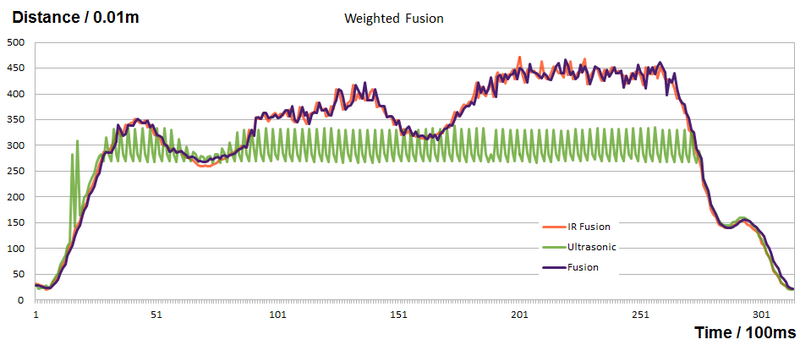
Im Rahmen einer Bachelorarbeit wurde ein System entwickelt, das einen Ultraschall-, einen Inertial- , einen Druck- sowie zwei Infrarotsensoren fusioniert und somit eine verlässliche Hoehe als Grundlage der Höhenregelung ausgibt (Bild unten). Problem bei der Fusion ist die Tatsache, dass die unterschiedlichen Sensoren verschiedene Messbereiche und Verlässlichkeiten besitzen, weshalb ein spezieller Algorithmus (Weighted Filter) verwendet wird. Das System ist in der Lage seine Höhe zu halten - auch bei einem Treppenflug (Video ) - und kann per Fernsteuerung verschiedene Höhen anfliegen. Des Weiteren wurde ein Verfahren entwickelt, dass ein autonomes Starten- und Landen ermöglicht (Video).
Positionsregelung unter Verwendung des Prinzips des optischen Flusses
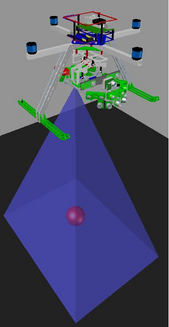
Im Rahmen einer Bachelorarbeit wurde ein System entwickelt, das mit einer auf den Boden gerichteten Kamera den optischen Fluss misst und somit Positionsänderungen registriert. Zur Messung des optischen Flusses kann sowohl eine Kamera verwendet, deren Bilddaten von einem Mikroprozessoren unter Verwendung eines Algorithmus basierend auf der differentiellen Methode von Lucas-Kanade ausgewertet werden, als auch mit dem optischen Fluss-Sensor ADNS-3080 von Avago Technologies. Darauf aufbauend wurde eine Positionsregelung implementiert, die das autonome Halten und Anfliegen von Positionen ermöglicht (siehe Bild unten). Per Computer-Terminal können somit dem Quadrocopter Positionen vorgegeben werden, die er autonom an- und abfliegt (Video).
Hinderniserkennung und Kollisionsvermeidung mit Ultraschall
Im Rahmen einer Diplomarbeitwurde ein System entwickelt (siehe Bild unten), das mit 12 Ultraschallsensoren (SRF02) die Umgebung des Quadrocopter im Flug abscannt und somit Hindernisse erkennt. Unter Verwendung dieser Abstandsmessung wurde eine Abstandsregelung implementiert, die den Quadrocopter in einem vorgegeben Abstand zu einem Hindernis hält, sobald ein solches erkannt wird. Gemeinsam mit einer Höhenregelung ermöglicht dies einen autonomen Flug unter guten Bedingungen. Im Labor kann der Quadrocopter autonom fliegen, indem er seinen Abstand in beide Richtungen regelt und der Abstand z.B. per Steuerung variiert wird. Ein bewegliches Hindernis, wie z.B. eine Pappwand (Video), wird erkannt und der Quadrocopter hält seinen Abstand sowohl nach vorne als auch nach rechts. Jedoch haben Ultraschallsensoren Schwierigkeiten, alle Oberflächen zu erkennen. Unter anderem werden Personen mit Kleidung nicht verlässlich erkannt, weshalb aktuell an einer Verbesserung des Systems unter Verwendung weiterer Sensorik gearbeitet wird.