

Deals3D

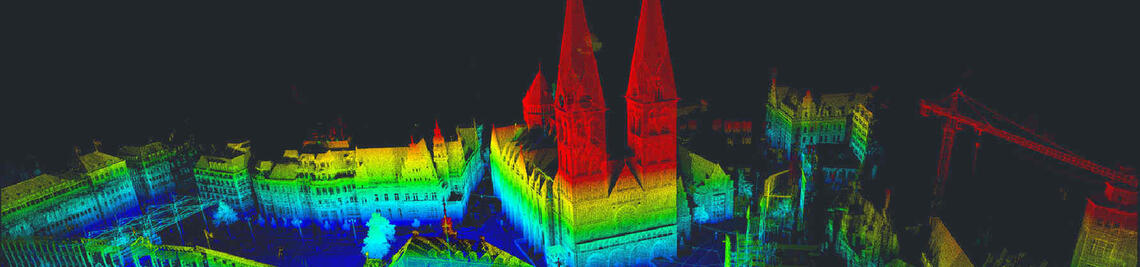
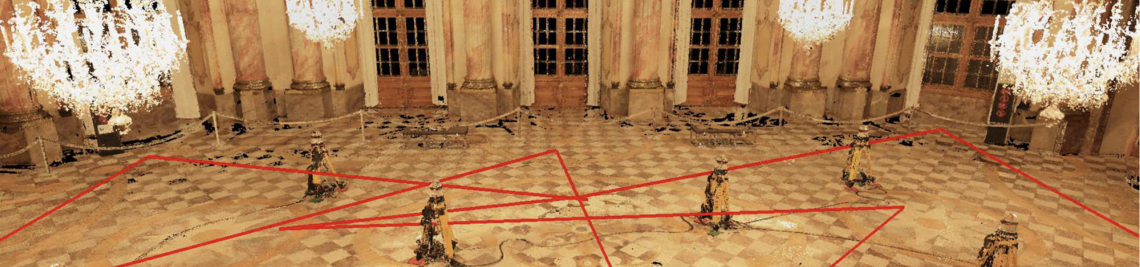
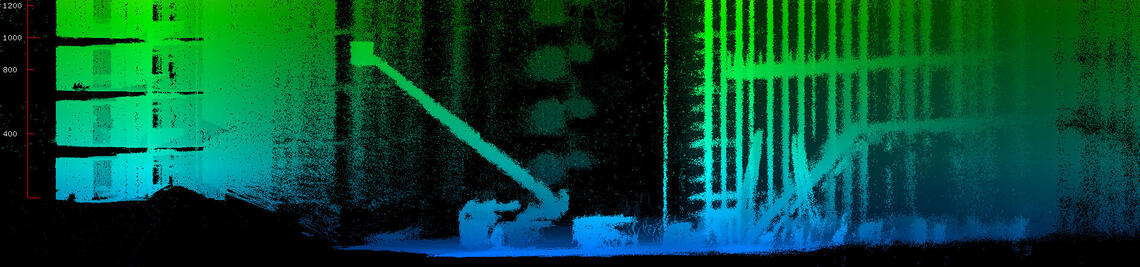
Laser scanners are high-precision measuring devices for non-contact scanning of surfaces. LiDAR (Light Detection and Ranging) is a well-established technology for detecting objects and scenes. By combining laser scanning with classic surveying technology, LiDAR technology provides accurate geo-referenced data, which is necessary for topographic applications, for example. Increasingly, UAVs equipped with camera systems are also being used to generate virtual three-dimensional models using structure-from-motion, an image-based evaluation method for surveying objects. The advantage of this method over the use of a laser scanner is that it can also be used to map difficult-to-access environments, but this process requires lengthy evaluation steps in order to achieve a comparable level of precision. Both methods complement each other in their characteristics.
The idea of the project is to automatically combine and interpret the data from a sensor network of different mapping sensors as well as inventory data from previous surveys into a common, highly accurate three-dimensional map, so that relevant information for assessment, documentation and preservation of monuments is available to the end user. By using different sensor modalities, algorithms have to be developed and extended which abstract from the respective sensor model and enable data fusion. In addition to the geometric merging of the point clouds, this is to be achieved by radiometric fusion of the acquired sensor data, as well as a change analysis in the temporal context.
