Navigation system
Navigation System
The navigation system provides the basis for
- path planning in the ground control centre,
- path tracking and determination of the relative position towards the target,
- identification and avoidance of obstacles on the path,
- accurate positioning of scientific instruments before measurements,
- avoidance of conflicts with the tether lay.
The navigation system concerns the methods of determining position, course, and distance travelled. In the framework of the MIDD-mission this subsystem is essential to reach specified targets for instrument deployment,
- to provide the appropriate orientation for imaging,
- to position the scientific instruments for measurements,
- to avoid conflicts with the tether during motion,
- to enable a return to the Lander,
- to detect emergency situations.
In order to achieve the MIDD mission objectives, there is information to be provided about
- the relative position towards the Lander,
- the attitude of the vehicle segments,
- obstacles encountered on the planned path.
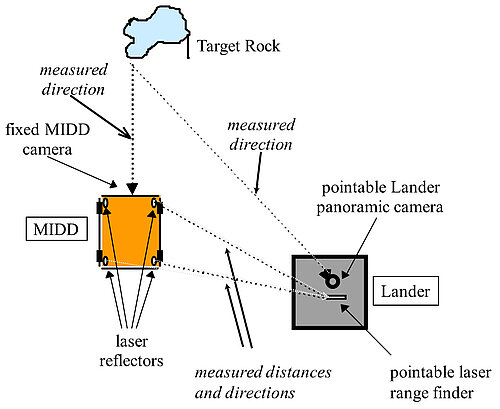
Mars rover MIDD's navigation system
The navigation system is based on data from the two cameras (one on the rover and one on the lander) and of laser pointer as well as on triangulation methods.