VAMEX
Motivation
Planetary rovers operating on Mars must traverse loose regolith, slopes, and heterogeneous terrain while maintaining mobility, stability, and efficiency. Traditional wheel designs are often optimized for low-speed traversal and are prone to slip, sinkage, or immobilization in soft soil.
VAMEX targets fast and reliable surface mobility, motivating the exploration of unconventional locomotion concepts. Bio-inspired solutions offer a promising pathway to overcome the limitations of classical rover designs, particularly for missions requiring extended coverage and rapid surface exploration.
Bio-inspired wheel design
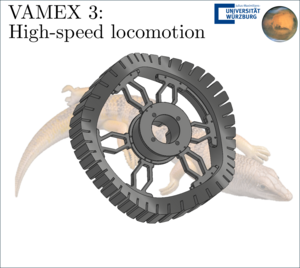
Our approach is inspired by sandfish lizards, which exhibit remarkable locomotion performance in granular media. By translating key biomechanical principles into engineering design, we aim to improve traction, reduce sinkage, and enhance maneuverability on loose planetary soils.
As a first step, prototype wheels have been designed and manufactured, incorporating bio-inspired geometries tailored for high-speed motion in sand-like environments. These wheels form the basis for experimental evaluation and iterative design refinement within the VAMEX framework.
Experimental focus
The developed wheel concepts are being investigated using laboratory testbeds that emulate Martian regolith conditions. Key research questions include:
- Traction and slip behavior at elevated speeds
- Force generation in longitudinal and lateral directions
- Energy efficiency and mechanical robustness
- Scalability to full rover systems
The results directly inform rover-level design decisions and mobility strategies for Mars missions.
Topics for students
We welcome motivated students interested in planetary robotics and experimental rover development. Possible topics include:
- Design and optimization of bio-inspired rover wheels
- Experimental characterization of wheel–soil interaction
- High-speed locomotion modeling in granular media
- Integration of novel mobility concepts into Mars rover architectures
Students will work hands-on with hardware, simulations, and testbeds, contributing to an active national Mars mission initiative.