
Teaching
The objective of the Chair of Space Informatics and Satellite Systems is to provide to students of all levels a comprehensive background in various fundamental aspects of satellite systems design, going from the mission analysis to the hardware development, as well as experience thanks to the hands-on activities included in the lectures.
Lectures
The on-board estimation and tracking of a target Resident Space Object’s (RSO) pose, including its position and orientation, is a crucial technology for enabling various on-orbit servicing and active debris removal operations. These missions rely on real-time data about the target's pose relative to the servicer spacecraft to ensure the safe, autonomous, and efficient execution of rendezvous and docking maneuvers. Using a low Size-Weight-Power-Cost (SWaP-C) sensor, like a monocular camera, to extract pose information from individual or sequential images is particularly appealing compared to more complex systems such as LiDAR or stereovision. The course will cover various aspects essential for achieving real-time pose tracking, including hardware integration, synthetic and laboratory-based image generation and processing, neural network training for pose estimation, and the validation and verification of the system's performance. Students will gain hands-on experience in developing and testing the critical technologies required for autonomous spacecraft operations in real-world scenarios.
In the introductory sessions of this module, the fundamentals of Spacecraft Pose Estimation will be presented, and several topics for the practical project work will be introduced to the students. Each group (with a minimum of 2 and a maximum of 4 students) will work on a single topic. These topics will be discussed further during weekly meetings as follows:
- Students will be provided with literature by the supervisor and will also conduct independent literature review. The results will then be presented to the supervisor.
- The instructor will discuss the concepts for implementing the individual projects in software and/or hardware.
- Students will develop a work plan and implement it. The work will include the development and testing of software and/or hardware components.
- Technical details will be discussed during the weekly meetings.
Assessment: Students will present their progress in two interim presentations (a preliminary design review and a critical design review) and a final presentation, each lasting 15 minutes followed by a 15-minute discussion. Additionally, they will submit the developed hardware or software solution along with a brief documentation (maximum 20 pages).
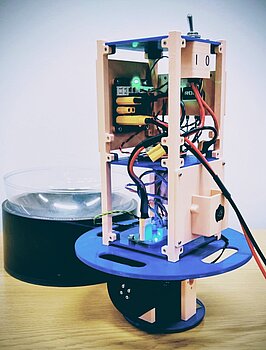
The Chair of Space Informatics and Satellite Systems (SISAT) at the University of Würzburg (Germany) has developed a Floating Satellite (FloatSat) system in order to help students understand and get familiar with basic satellite subsystems and also to develop and test different attitude control algorithms and strategies for small satellites in an almost frictionless environment similar to that in space. This system has been used with excellent feedback by our postgraduate students as a compulsory course in the SpaceMaster program, as well as by our undergraduate students as a part of the exercises offered in the Aerospace Laboratory.
The FloatSat system is consists mainly from a mechanical structure that contains the basic satellite subsystems. This structure is placed into a hemisphere shell that it is floating inside a spherical air bearing unit. The air bearing unit requires compressed air input may vary depending on the mass of the floating unit. In order to monitor and command the FloatSat, a ground station computer is used to communicate via the Bluetooth or the Wi-Fi module available in the satellite through commanding and telemetry display tool.
Assessment by project documentation (~20 pages) and presentation (~30-45 min)

The study of Space Dynamics focuses on the motion, stability, and control of satellites and spacecrafts. It combines celestial mechanics, rigid-body dynamics, and control theory to solve practical challenges in orbit prediction, station-keeping, and interplanetary navigation. Mastery of these concepts is essential for designing and operating any successful space mission.
This module introduces the fundamental principles of astrodynamics and the orientation control of satellites. It covers essential sensors, actuators, and control software used in spacecraft attitude control. Students gain insight into practical implementations, including both spin-stabilised and three-axis stabilised satellite systems. Upon completion of the module, students will have mastered the dynamic foundations required for spacecraft design. They will be familiar with the key sensors and actuators used in spaceflight and understand their respective applications.
Assessment via written examination (~90-120 min)
The Control Engineering 2 course presents the tools to bridge the gap between continuous-time physical systems and the digital, discrete world. In this course, you will learn how to design, simulate, and implement digital controllers while managing physical hardware limitations like sampling latencies, calculation dead-time, and actuator saturation. You will master discretization techniques like Bilinear and Zero-Order Hold methods, sampling penalty, and stability analysis to ensure your digital control loops remain stable and performant.
Assessment via written examination (~90-120 min)
Der Kurs zur Einführung in die Flugmechanik analysiert die Dynamik von Luftfahrzeugen im atmosphärischen Flug. Aus dem Impuls- und Drehimpulssatz werden nichtlineare Bewegungsgleichungen abgeleitet, um aerodynamische Kräfte, Schub und Gewichtskraft zu bilanzieren. Die Analyse der Flugstabilität wird im gesamten Verlauf des Kurses behandelt, wobei auch Werkzeuge zu deren Bewertung vermittelt werden. Diese mathematischen Modelle dienen als Grundlage für die Flugsimulation und die Entwicklung moderner Flugregelungssysteme. Letztendlich schlägt dieser theoretische Rahmen die Brücke von der grundlegenden Physik zur praktischen Anwendung, um die Flugeigenschaften von Luftfahrzeugen zu bewerten.
Bewertung durch schriftliche Prüfung (~90-120 min)
English version:
The Introduction to Flight Mechanics course analyzes aircraft dynamics in atmospheric flight. Non-linear equations of motion are derived from the conservation of momentum and angular momentum to balance aerodynamic forces, thrust, and gravity. Aircraft stability analysis is discussed and tools to evaluate it are provided throughout the course. These mathematical models serve as the foundation for flight simulation and the development of modern flight control systems. Ultimately, this framework bridges fundamental physics with practical application to assess aircraft handling qualities.
Assessment via written examination (~90-120 min)
Theses
As part of its teaching activities, the Chair of SISAT supervises both Master’s and Bachelor’s theses. The primary objective of these projects is to equip students with the ability to conduct independent scientific work and develop their own research contribution. This includes performing a thorough literature review, practicing academic writing, and developing a coherent and suitable structure for their thesis. Students learn to address a scientific problem or research question, formulate well-founded conclusions, and critically evaluate their own results.
Theses in Progress
Abstract:
As space becomes increasingly congested with debris, autonomous spacecraft rely on robust vision-based navigation systems. Obtaining the large volumes of real on-orbit imagery needed to train these AI-based algorithms is extremely difficult and costly. Synthetic training data, therefore, becomes essential for enabling scalable, realistic learning environments. This thesis addresses this challenge by focusing on the physically based modeling and rendering of Earth’s atmosphere for low Earth orbit imagery. It identifies the key atmospheric effects that influence space imagery, formalizes the technical and functional requirements for realistic simulation, and explores their implementation in Blender. Using the resulting virtual environment, synthetic images of spacecraft are generated and compared to real reference data, with the goal of improving the realism of synthetic training datasets and supporting the development of robust vision-based navigation systems for future space operations.
Abstract:
As space becomes increasingly congested with debris, autonomous spacecraft rely on robust vision-based navigation systems. Obtaining the large volumes of real on-orbit imagery needed to train these AI-based algorithms is extremely difficult and costly. Synthetic training data therefore becomes essential for enabling scalable, realistic learning environments. To support this need, this thesis focuses on improving the realism of simulated on-orbit imagery by modeling the behavior of spacecraft camera sensors and the artifacts they introduce. It involves identifying and formalizing the technical and functional requirements for physically plausible image simulation and implementing a representative camera model in Blender, including effects such as optical distortions, sensor noise, and compression artifacts. By preparing comparisons with benchmark datasets like SPEED+, the thesis aims to contribute to future high-fidelity rendering frameworks that help close the gap between synthetic and real space imagery.
Date: 2026
Abstract:
The growing population of resident space objects (RSOs) in Earth orbit demands scalable and accurate tracklet correlation methods for space debris catalogue maintenance. Classical pairwise tracklet-to-tracklet correlations that are based on initial orbit determination (IOD), boundary-value formulations, or Lambert-based association checks scale quadratically with the number of tracklets, creating a significant computational bottleneck for large catalogues. Clustering-based approaches offer a promising alternative by mapping tracklets into an orbital feature space, hence objects sharing similar dynamical characteristics can be grouped without exhaustive pairwise testing. However, the effectiveness of this approach is critically dependent on the choice of orbital features used to represent each tracklet. Features derived from preliminary orbit estimates must be sufficiently discriminating to separate distinct objects while being robust to the measurement noise inherent in short observation arcs.
The primary objective of this thesis is to systematically investigate which orbital features, derived from preliminary IOD estimates, are most discriminating for clustering-based tracklet correlation, and to evaluate the role a neural network can play in producing more robust and information-rich feature representations compared to classical IOD methods. The research bridges two connected problems: the quality of the feature representation depends directly on the accuracy of the preliminary orbit estimate, and the accuracy of the IOD step can be improved using learned models that are more robust to noise and arc length limitations than classical analytical solvers. Evaluation and validation will use simulated detection datasets representative of GEO and LEO surveillance scenarios.
Date: 2026
Abstract:
Uncertainty propagation is an essential aspect of Space Domain Awareness (SDA), specifically for conjunction analysis and collision avoidance operations. Numerous methods have been studied and developed to improve the prediction of uncertainty evolution in the Earth-bound Two-body problem, considering various uncertainty sources and handling nonlinearity. In the cislunar region, uncertainty propagation is fundamentally a problem of evolving probability distributions under nonlinear multi-body dynamics. The Earth–Moon Circular Restricted Three-Body Problem (CR3BP) introduces dynamical regimes wth near resonant orbits, manifold intersections, chaotic dynamics, where an initially compact and Gaussian uncertainty cloud rapidly deforms into shapes that no single ellipsoid can adequately describe. A covariance matrix is a second-moment summary that captures the size and orientation of the uncertainty ellipsoid but is blind to stretching along curved manifolds, asymmetric and spreading.
Neural network presents itself as a potential tool capable of predicting the complex evolution of orbit uncertainty. Previous work on neural network uncertainty propagation in astrodynamics has almost exclusively targeted covariance prediction, inheriting the ellipsoidal limitation by design. The objective of this thesis is to develop and train a model that, rather than predict a covariance matrix, predicts the parameters of a Gaussian Mixture Model (GMM), which can represent multi-modal, banana-shaped, and asymmetrically stretched distributions as they actually appear in Monte Carlo ensembles propagated through chaotic cislunar regimes. This architecture is known as a Mixture Density Network (MDN), introduced by Bishop (1994) and well-established in the machine learning literature, but not yet applied to cislunar uncertainty propagation.
Past Theses
Date: February 04, 2026
Abstract:
The main goal of this thesis is to analyse the stability of numerical integrators in the scope of the circular restricted three-body problem. This is mainly motivated by the increasing interest towards the Moon over the past years, the rise of new programs, and the involvement of private actors. Unlike the analytically solvable 2-Body problem governing Earth-bound orbits, cislunar and interplanetary orbits are dominated by the sun, moon and massive celestial bodies like Jupiter. Previous approaches focused on simplified versions of this problem, like the perturbed two-body problem or on other aspects of numerical integration, like computational efficiency. This thesis aims to focus on the circular restricted three-body problem.
As a first task, the work provides a stability benchmark for numerical integrators, capable of assessing the stability with the conservation of the Hamiltonian, round-trip closure, and comparison with manufactured solutions. Furthermore, implicit Runge-Kutta methods, explicit Runge-Kutta methods, and Taylor methods are implemented and compared using the stability benchmark. While
The low-order RK methods performed decently when predicting smooth trajectories, integrators based on Taylor’s method and high-order Runge-Kutta methods like Fehlberg78 reign supreme for stiff regions of the CR3BP phase space.
Date: December 16, 2025
Abstract:
In recent years, there has been a significant increase in the number of small satellites in Low Earth Orbit (LEO), which, together with the continuous issue of space debris, has led to higher orbital traffic and intensified the challenge of preserving satellite missions by performing orbital corrections to evade collisions with other objects in orbit. These maneuvers have usually been carried out using chemical propulsion systems. However, the persistent usage of these systems can highly affect the operational lifetime and power budgets of small satellites, especially those with limited onboard resources. As a result, there has been growing interest towards investigating novel approaches to leverage atmospheric drag and solar radiation pressure (SRP) as a means of propellant-less control, especially in orbital regimes where these two environmental forces are comparable.
This thesis examines the problem of mitigating orbital decay over a one-year period for a representative Sun-pointing satellite in such an orbital regime. The approach is based on the idea of controlling the satellite attitude to mitigate decelerating forces, primarily atmospheric drag, and, when possible, harness the accelerative contribution offered by SRP.
To this end, a linear discrete-time Model Predictive Controller (MPC) is implemented. The objective function is designed to mitigate orbital decay by focusing on the semimajor axis. Moreover, particular attention is given to the consideration of various representative operational constraints, the strictness of which has been enhanced to assure broad applicability of the approach. Finally, the proposed optimal control strategy is validated via a test campaign, demonstrating its effectiveness compared to the uncontrolled case.
Looking to Write a Thesis?
If you are interested in writing your thesis with us, please visit our Theses and Positions page. All currently available topics are listed there. We also welcome and encourage students to propose their own research ideas, which we are happy to discuss for feasibility.
