

Press
Outreach is important. I am happy to give press interviews etc. given that I put a local copy on my webpage.
2024
- "Studie: Wie wollen wir in Zukunft in den Städten leben?" - Tagesschau, 20. Juni 2024 (local copy).

- "Urbane Hitzeinseln vermeiden: Warum Würzburg jetzt per Lastenrad kartiert wird" - Deutschlandfunk, 20. Juni 2024 (local copy).
- "Deutsche Forscher üben Suche nach Außerirdischen" - BILD, March 16, 2024 (local copy).

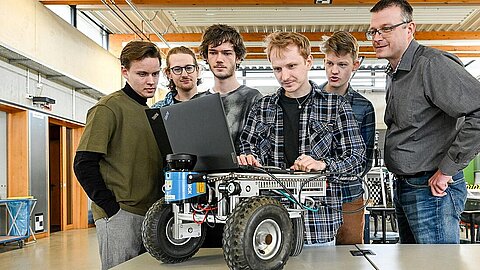
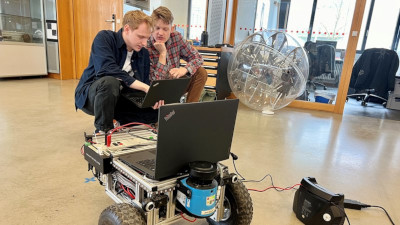
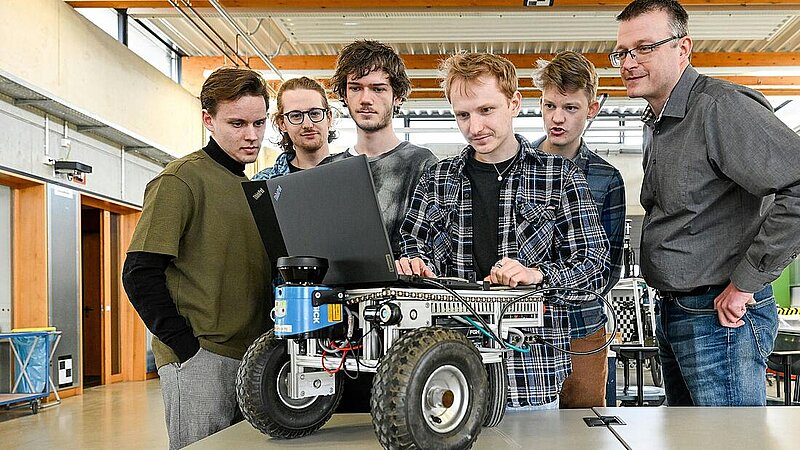
- "Auf zum Mars - Würzburger Roboter proben in Armenien" - F.A.Z., March 16, 2024 (local copy).
- "›Analoge Astronauten‹ unterwgs in der armenischen Steppe" - Meppener Tagespost, March 12, 2024.

- ntv - Auf zum Mars - Würzburger Roboter proben in Armenien, March 16, 2024 (local copy).

- "Test in der armenischen Wüste: Landen die Roboter Charly und Lars aus Würzburg in einigen Jahren auf dem Mars?" - MainPost, March 10, 2024, (local copy).

- "Würzburg/Ararat: Roboter der Uni proben für Marsmission" - Radio Gong, March 8, 2024, (local copy , interview link)

- "Wie Würzburger Roboter es auf den Mars schaffen könnten" - Bayerischer Rundfunk, February 2024, (local copy).
- "Wie Würzburger Roboter es auf den Mars schaffen könnten" - Bayerischer Rundfunk, Frankenschau, February 2024 (copy).

- Müncher Abendzeitung reports about AMADEE-24 (local copy), February 2024.



2021
- Technology Review mentions our project TASTSINN/VR (local copy), May 2021.

- InceptiveMinds reports about our Daedalus ESA study, as well as scitechdaily, Universe Today, ExtremeTech, as well as many others, Spring 2021.
- Bayerischer Rundfunk radio interview about the Daedalus ESA study (local copy), May 2021.

- Antenne Bayern radio interview about the Daedalus ESA study (local copy), May 2021.

- We got a feature in Digital Trends with our Deadalus study, April 5, 2021.
- We got another article at POPULAR SCIENCE (local copy - pdf), April 5, 2021.
- Article at POPULAR SCIENCE (local copy - pdf), April2, 2021
2020
- Mainpost, November 12, 2020 (local copy - pdf)

2019
- Mainpost, September 10, 2019
Forscher zeigen, wie Roboter bei Rettungseinsätzen helfen können (local copy - jpg) (local copy - pdf)

- Bayern 1, September 6, 2019
Rettungsroboter in Würzburg (local copy)

- Radio Charivari, September 6-7, 2019 (local copy)

- BR24, September 5, 2019
Wenn Roboter leben retten (link) (local copy)

- heise online, September 5, 2019
Robotikkonferenz SSRR: Wenn’s rau wird, rufe den Roboter (link) (local copy)

- heise online, September 4, 2019
Robotikkonferenz SSRR: Rettungsroboter: Gebäudeschäden dokumentieren und unter Geröllhaufen kriechen (link) (local copy)

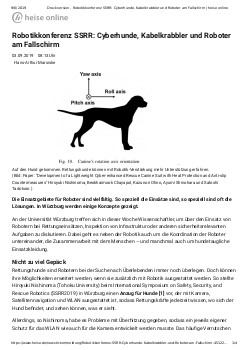
- heise online, September 3, 2019
Robotikkonferenz SSRR: Cyberhunde, Kabelkrabbler und Roboter am Fallschirm (link) (local copy)
- BR Fernsehen, September 3, 2019
Konferenz an Würzburger Uni - Wenn Roboter Menschen retten (local copy)

- BR Tagesticket, September 2, 2019
Wie funktionieren Rettungs-Roboter? TAGESTICKET - DER FRÜH-PODCAST (podcast) (local copy)

2018
- MainPost, Summer 2018
Über die FH zum Doktortitel - Wie Rainer Koch aus Dettelbach als erster Absolvent in Bayern über einen Hochschulverbund promoviert hat (article)

2017
- Oldenburgische Volkszeitung, 10.05.2017
Hightech trifft auf Altertum - Messe beim Archäologie-Dienstleister denkmal3D (article)

- Produktion, 05.04.2017
3D-Scans erleichtern Modellumstellung in der Automobilfertigung (article)

- Mainpost, 01.04.2017
Damit in der Autofabrik nichts kollidiert (article)




2016
- Mainpost, 19.03.2016
Selbstfahrendes Auto aus Würzburg im Finale (article)


- 19.01.2016
Spacemaster starten bei Autonomous Driving Cup (press release)
2015
-
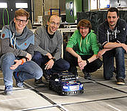
c't Heft 15, 18.09.2015.
GI-Innovationspreis für mobiles 3D-Laserscanning

2014
-
Radio Gong - Würzburg 2014.

2012
-
Weserkurier, November 18, 2012.

-
G/Geschichte, December 12/12.

-
Deutschlandradio Kultur, October 24, 2012.
-
Weserkurier, September 11, 2012.

-
Der Bausachverständige, August 2012.

-
Several new papers report about our robot Irma3D, February 2012. (See press release (German version) and press coverage).

-
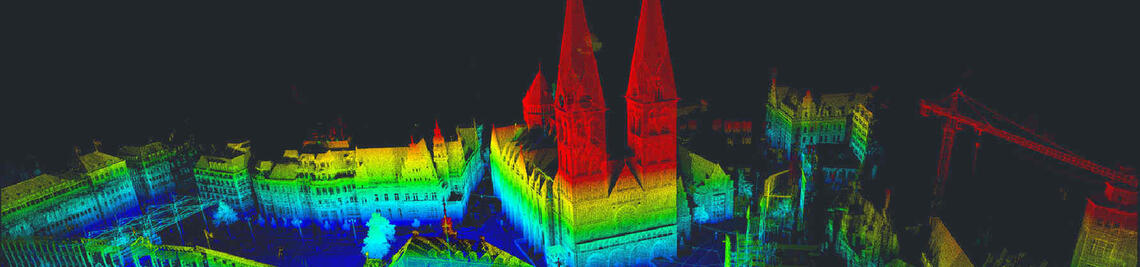
FOCUS Online, Hochpräzises Modell: Thermografischer 3D-Rundgang durch Bremens Innenstadt, February 7, 2012
(local copy, 16MB) -
buten un binnen, February 3, 2012

(local copy, 144MB)

2008
-
Spektrum der Informatik, April 2008.

local copy cover picture [JPG], local text [JPG], local text [PDF], Springer link [PDF]

2007
-
Pressemitteilung, Nr. 292/2007, Osnabrück, 2007-10-31.
local copy [Text 1 KB], UOS-Link [Text 1 KB] -
Pressemitteilung, Nr. 272/2007, Osnabrück, 2007-10-17.

local copy [Text 1 KB], UOS-Link [Text 1 KB] -
Bayrisches Fernsehen, August 30th, 2007.

local copy [Video File (AVI) 11 MB] -
Bayern 2, August 30th, 2007.

local copy [Audio File (WMA) 3 MB]
2006
-
C't, Heft 12, May, 2006.

local copy [Page 1 (JPG) 100KB] [Page 2 (JPG) 100KB] [Page 3 (JPG) 200KB]
See also www.heise.de and our ELROB page. -
Süddeutsche Zeitung, May 20th, 2006.
www.sueddeutsche.de
local copy [Text (HTML) 100KB]

2005
-
3SAT Nano, Summer 2005.

local copy [Video (DiVX) 111MB]
2004
-
Heise Ticker, Summer 2004.

2003
-
Spektrum der Informatik, December 2003.

local copy [JPEG] -
Hi!Tech Zukunftsmagazin, December 2003.

local copy [JPEG] -
3SAT Video about Kurt3D, [Nano] (in German), November 11,

[Video (DiVX) 22MB] [Video (MPG) 22MB]. -
ORF Video about Kurt3D, Modern Times (in German), October 10,

[Video (DiVX) 22MB] [Video (MPG) 22MB]. -
ERCIM News, October 2003.

Hartmut Surmann, Andreas Nüchter, Kai Lingemann, and Joachim Hertzberg. Kurt3D - An Autonomous Mobile Robot for Modelling the World in 3D, in ERCIM NEWS 55 : 24 - 25, ISSN 0926-4981, October 2003. [online article] [Get Magazine (PDF)] [Get Paper (PDF)].



