Fahrzeuglokalisierung basierend auf geometrischen Konfigurationen von Landmarken
09.11.2009Jan-Henrik Haunert, seit 1.9.2009 akademischer Rat am Lehrstuhl für Informatik I, stellt auf der Konferenz ACM SIGSPATIAL 2009 ein neues Verfahren zur Fahrzeuglokalisierung vor.
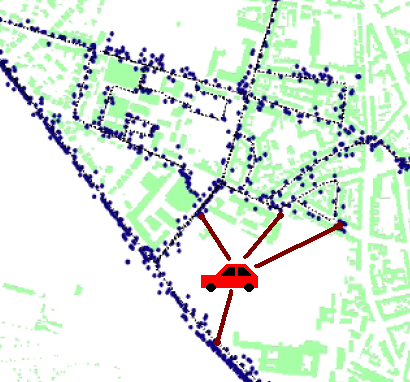
Autonome Fahrzeuge bedürfen einer genauen und zuverlässigen Positionierung. Das Positionierungssystem GPS kann die Anforderungen nicht alleine erfüllen, da es oft aufgrund von Abschattungen durch Bäume oder Häuser versagt. Aus diesem Grund können neben GPS Empfängern weitere Sensoren wie Laserscanner oder Kameras eingesetzt werden. Aus den Messungen dieser Sensoren können bestimmte Objekte wie Straßenschilder oder Bäume extrahiert werden. Die Fahrzeugpositionierung kann dadurch erfolgen, dass diese Objekte - sogenannte Landmarken - den Objekten in einer Karte zugeordnet werden.
Jan-Henrik Haunert entwickelte bereits am Institut für Kartographie und Geoinformatik der Universität Hannover Verfahren, dieses Zuordnungsproblem durch die Betrachtung der geometrischen Konfiguration der Landmarken zu lösen. Hier an der Universität Würzburg entwickelt er momentan diesen Ansatz weiter. Auf der ACM SIGSPATIAL GIS 2009 präsentiert er Forschungsergebnisse, die in Zusammenarbeit mit Claus Brenner entstanden sind. Die Vortragsfolien sind hier erhältlich.