
UWSensor
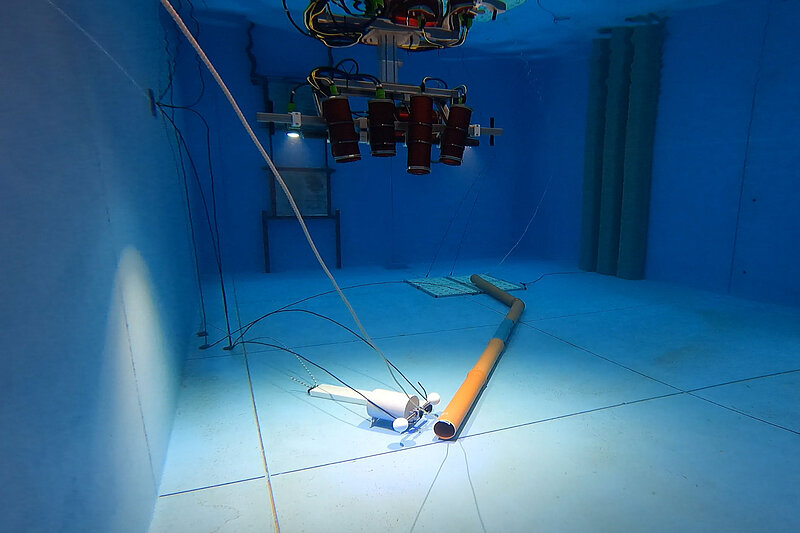

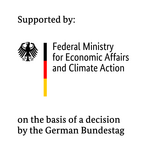
The UWSensor project developed a new 3D underwater sensor for mobile offshore surveying. The sensor is designed to be configured for operation by a Remotely Operated Vehicle (ROV). The system is mounted rigidly on the frame of the ROV or to an actuator to control the viewing angle. The sensor operates while the ROV is in motion and individual scans are fused together to continuously expand the scan field. The goal is a movement speed of the sensor of up to 1 meter per second.
The 3D sensor system developed in the UWSensor research project is based on active stereo with pattern projection.
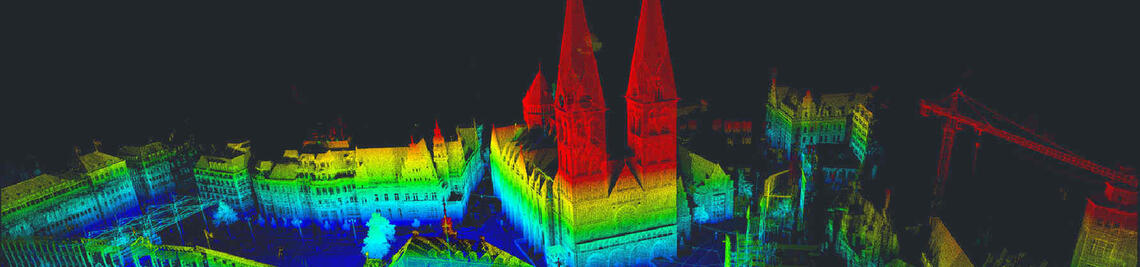
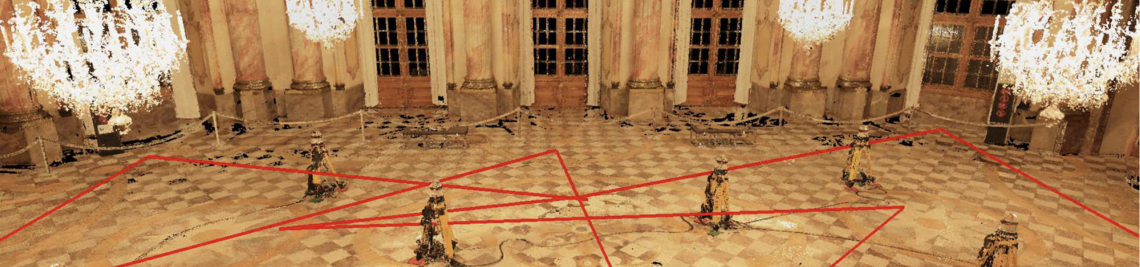
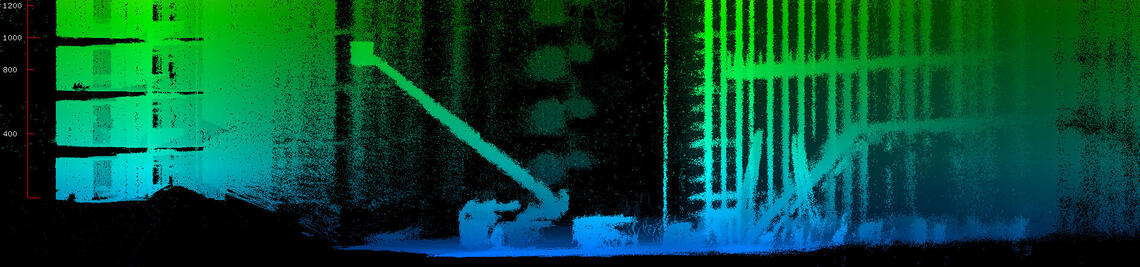
In order to measure precisely during fast movements in the water and to register the individual 3D scans into maps, the movement must be compensated. This requires accurate estimation of the sensor motion. There are several approaches to localization in an underwater environment. One of the difficult aspects of this effort is that approaches that work robustly on land cannot necessarily be implemented directly in underwater environments due to limited visibility conditions and media changes. Due to the nature of the sensor, camera-based approaches to underwater localization as well as methods based on registration of 3D data are used individually or in combination. However, this task remains challenging in highly unstructured underwater environments.
Furthermore, the assumption of a static measurement environment is violated in the case of fast sensor movements, since the employed 3D measurement method is based on multi-image evaluation, which is accompanied by a small temporal offset. These problems are addressed by generating an initial trajectory based on visual-inertial odometry. Based on this trajectory, a motion compensation for the 3D reconstruction is performed.
Partners




Funding
Projekt Kennzeichen: 03SX482E