

Würzburg robots participate in the Mars simulation AMADEE-24.
02.02.2024AMADEE-24 is a Mars simulation conducted in a desert in Armenia. The expedition serves as an authentic trial run for the astronautic exploration of the Red Planet.
")
A six-person crew of highly qualified analog astronauts will conduct experiments with spacesuit prototypes during the simulation to prepare for future human and robotic Mars exploration missions. The astronauts will be in complete isolation and will be in contact with a dedicated Mission Support Center in Austria, with a 10-minute communication delay simulated.
A team of Würzburg students from the Elite Study Program in Satellite Technology will contribute to robotics experiments tested in the "Dress Rehearsal 2" in Vienna, Austria. The astronauts have been trained to control the robotic systems and perform scientific tasks using the robots as tools. Replicating human-robot surface activities on Mars in Earth analog environments has proven to be effective in developing optimal mission architecture for complex research operations. Similar challenges arise in satellite construction: there is a ground segment, communication is only sporadic and delayed, and experiments must be well planned and executed.
Exploration missions to the Moon and Mars require a satellite infrastructure and contribute to a deeper understanding of the benefits and drawbacks of future robotic and astronautic explorations. They provide added value for the preparation of scientific operations in remote areas and help to identify the limits and possibilities of technology and work processes.
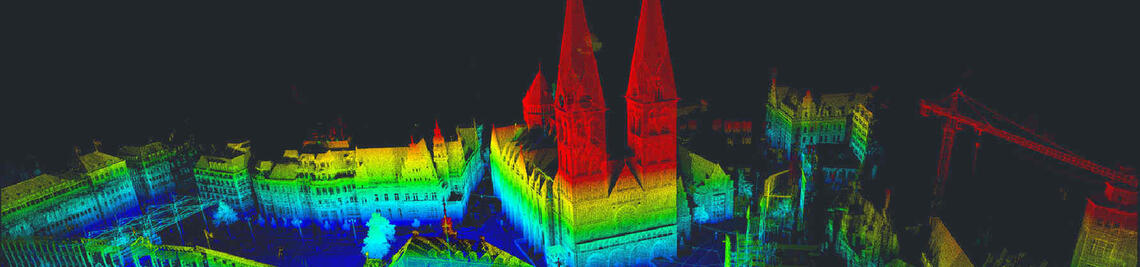
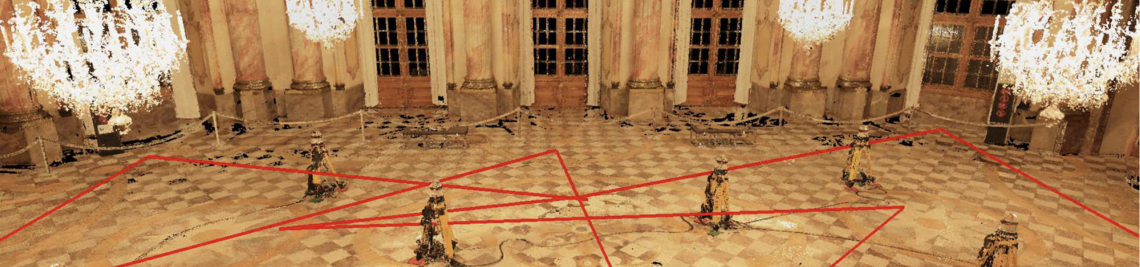
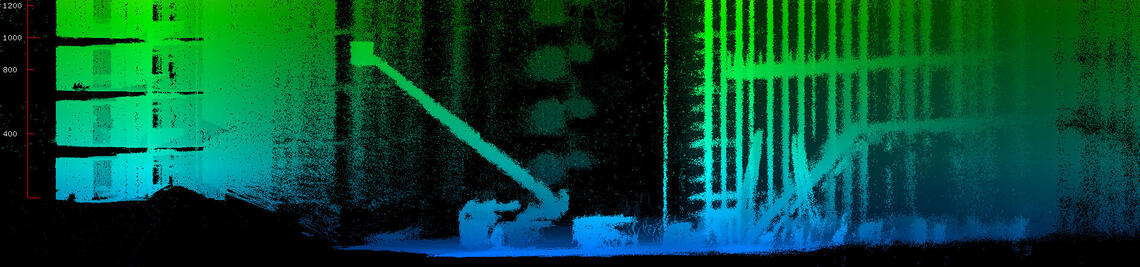
The test site in the Ararat province was chosen due to its geological and topographical similarity to Mars. The Robotics Chair has sent two robotic systems that are involved in three experiments. In addition to creating 3D maps and conducting geological analysis experiments, ultrawideband (UWB) localization using trilateration will be tested. The robot distributes sensor nodes that establish a local coordinate system, and the localization is then performed similarly to GPS.
Weitere Bilder
")
")
