

TeleLab

This course aimes to use modern teleoperation and make robotics approchable to more students. Experiments that are part of this course can be performed via internet and these include experiments in robot kinematics, navigation of remote rovers, path planning and sensor data acquisition and processing. The robot used in the experiments is a four wheeled ackermann steered real wheel driven indoor mobile robot designed and built at the Department of Robotics and Telematics specifically for remote experiments.
The experiements available here include a carefully selected mixture of real-world and simulation of robotic principles. Various topics in field robotics including kinematics, navigation principles, path planning, theoretical analysis and inverse kinematics, sensor data acquisition and processing are discussed and students are presented with challenging quizzes before beginning the experiments. Sensors are also chosen so that students get confusing results and are supposed to spend time thinking about the acquired sensor values and how to interpret those. Time delay concepts in robot teleoperation on variable bandwidth networks are also transparently presented to users as part of involuntary learning.
Experiments
You are expected to perform
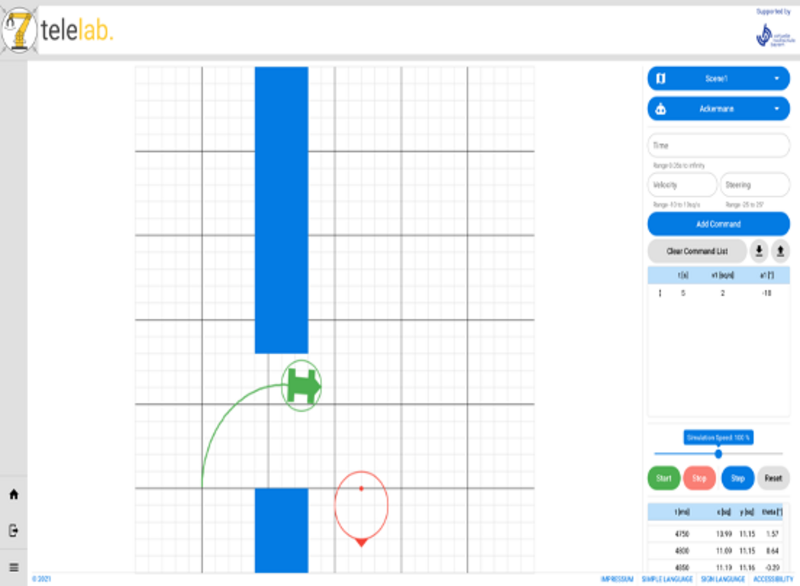
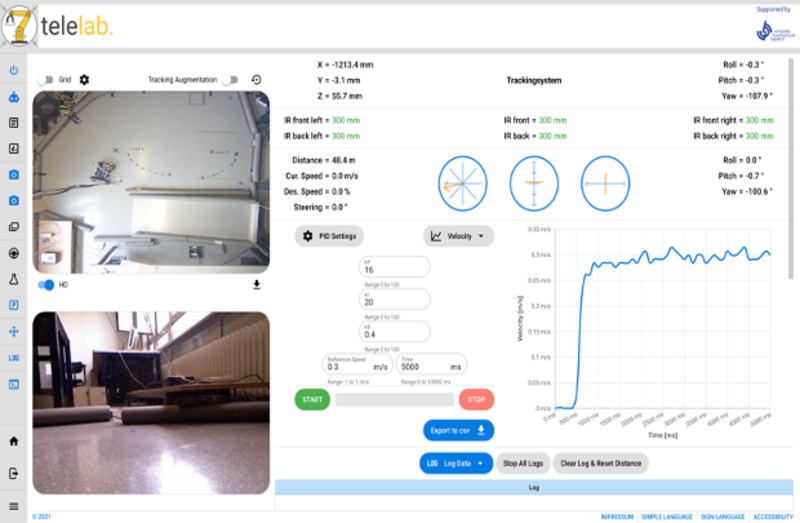
1. Experiments on an ackermann steered indoor mobile robot where you will learn
- Navigation of a remote car-like Robot
- Measurement, Sensing & Errors
- Tracking
2. Experiments with our Mobile Robot Kinematics Simulator where you will learn
- Holonomic, Non-holonomic Constraints
- Kinematic Models, Forward & Inverse Kinematics
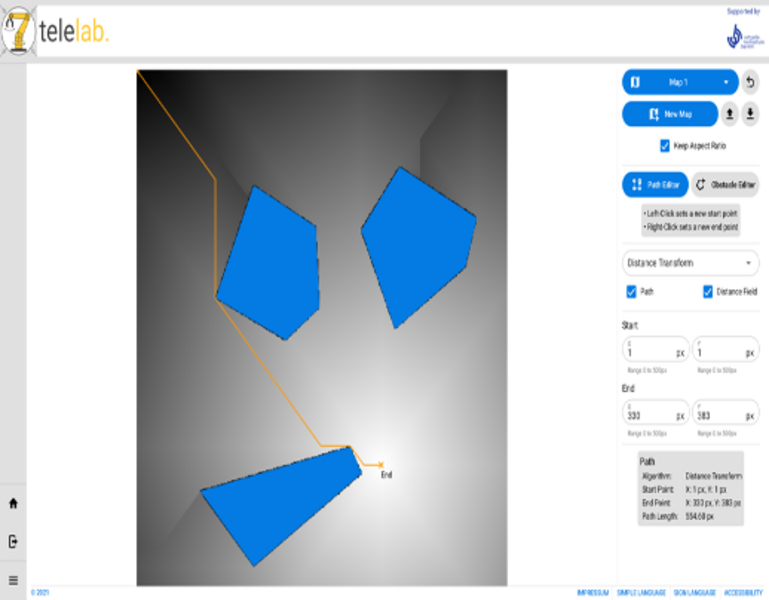
3. Experiments with our Path Planning Simulator where you will learn
- Basics of Path Planning in autonomous and semi autonomous conditions
- Performance Comparision: Potential Field, Distance Transform & Road Map Algorithms
Partially supported by

