

AMADEE-24
The AMADEE-24 challenge is a Mars-simulation conducted in Armenia by the Austrian space forum. In 2020, AMADEE has been conducted in the deserts of Isreal, as shown in the picture below. The test site in Ararat Province were selected for 2024 because of their geological and topographical similarity to Mars.

Mission Objectives
The AMADEE-24 mission has the following objectives:
- Explore instrument behavior while using instruments with the option of "humans-in-the-loop," "humans as part of the workflow" (through two space suit prototypes with high realism, wearable systems, etc.).
- Developing platforms to test life detection or Earth science techniques and robotic support tools for astronautical missions. Creating concepts that enable high situational awareness for support teams that are not in the field.
- Investigating the analog as a model region for its Mars counterpart.
- Increasing the visibility of planetary science and human research activity.
- Develop the expertise to best manage astronaut missions to Mars: by providing a realistic model for a mission support center, planning the missions of analog astronauts*, and creating a comprehensive framework for decision making.
Our chair, as well as two partners (FH OÖ Forschungs & Entwicklungs GmbH, University of Applied Sciences Würzburg-Schweinfurt) are part of AMADEE-24 and participate with multiple rover-like robots.
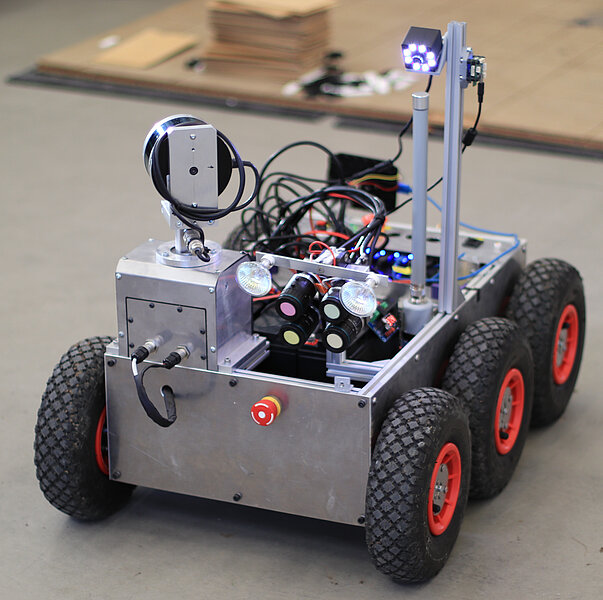

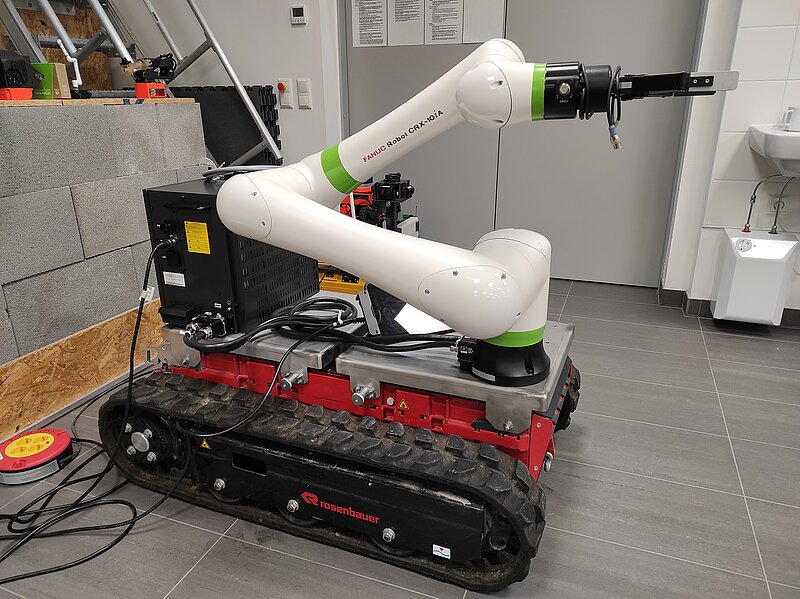
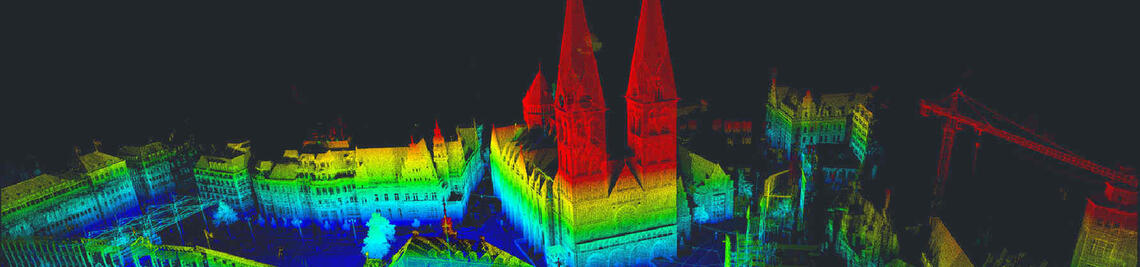
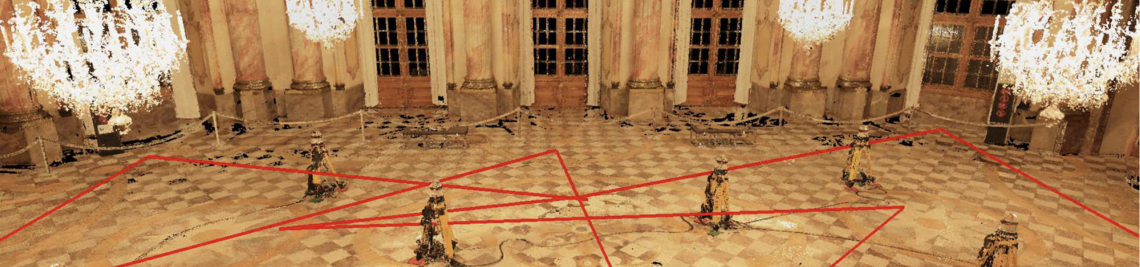
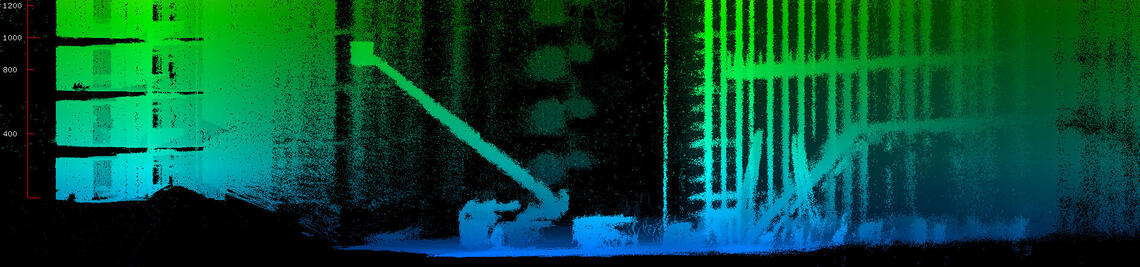
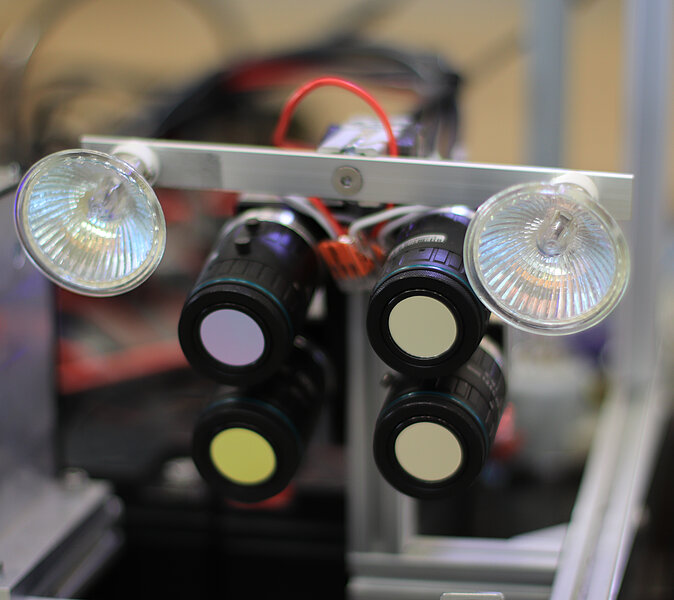
The payloads on these robots include a robotic arm for collecting samples, a multi-spectral sensor for sample analysis, and laser-scanners for precise mapping.

Using these robots, we address the following scientific questions:
- How can we model a robust scene-understanding, semantic mapping and terrain modeling in desert environments with mobile robots?
- What is the trafficability of the terrain: Obstacles entity evaluation has effects on subsequent parts of the robotic mission as well as impacts on human accessibility and spacesuit design with mobility constraints?
- What intuitive operating concepts need to be developed for remote control access and what autonomy functions can help astronauts with tele-operation?
- How can we support analog astronauts and to improve the sample collection, identification and analysis with a robotic system?

