

Yijun Yuan successfully completes his PhD!
18.09.2024Yijun Yuan defended his thesis titled "Incremental continuous scene modeling - Geometric, Color, Semantic representations and unified framework for robotic mapping" on 18.09.2024 successfully.
Abstract of the thesis: There is a great deal of interest in efficient, accurate and reliable high-quality scene modeling:
In robotics, especially for autonomous robots and drones, high-quality scene modeling is essential
for navigation and interaction within complex environments. In agriculture, farmers require the
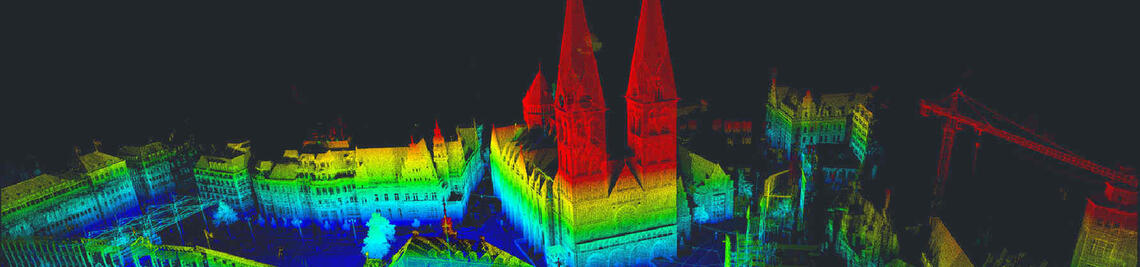
tool for precision monitoring and cropping. In architecture and construction, engineers use it to
assist Building Information Modeling (BIM) in creating detailed 3D representations of buildings
and infrastructure. In the entertainment industry, high-quality scene modeling facilitates the creation
of immersive experiences in films, video games, and virtual reality (VR). While the process
of object and small scene modeling is well developed with implicit representation, precise incremental
reconstruction on large scenes remains a complex and challenging task, due to the high
budget required for loop correction. Besides the geometric modeling, color suffers from the need
to accommodate more complex patterns, and supports only inefficient post-training. Semantic
modeling also presents a significant challenge. Due to the significantly higher dimensionality, it
is even more difficult to model semantic information in continuous space.
This thesis deals with the Dense SLAM and the challenges of the new trend of continuous
mapping and usage on large scale. To support loop-correction on large scale, IMT-Mapping
introduces an SE(3)-transformable implicit map for remapping functions. IFR makes SDF-to-
SDF registration without moving the field, thereby providing an efficient way for aligning two
sub-maps. Turning from geometry to color, NSLF-OL introduces online-learning of high quality
color alongside real-time reconstruction. Analyzing the limitations of previous research, Uni-
Fusion proposes Universal Continuous Mapping for all map properties, even high-dimensional
CLIP features, without any training. SceneFactory designs a workflow-centric framework that
uniformly supports a complete range of Incremental Scene Modeling.
The combination of these contributions results in the emergence of a novel general concept in
this thesis: Incremental Continuous Scene Modeling (ICSM). ICSM transcends the conventional
limitations of dense SLAM, offering a versatile and comprehensive approach to high-quality incremental
mapping of various features (geometric, color, semantic, and more), sensor setups, and
applications (Dense RGB/RGB-D/RGB-L/Depth-only SLAM, Unposed & Uncalibrated MVD,
and more).
Weitere Bilder

