

MultiUWS
In the subproject "Visual Odometry and 3D Reconstruction," the research activities of the Chair of Robotics at the Julius-Maximilians-University Würzburg focus on motion estimation of the sensor system, post-processing of sensor data, and the fusion of measurement data into a consistent 3D model. The project's work thus serves as the interface between individual captures of multimodal sensor systems, particularly the 3D sensor developed in the project, and the visualization of the sensor system's end product as a 3D map.
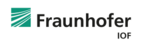
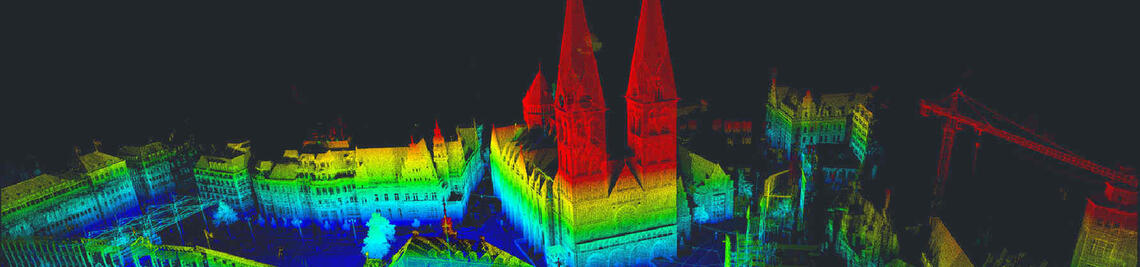
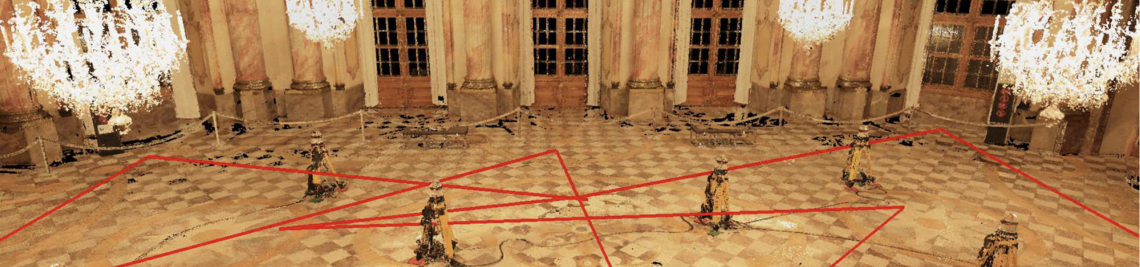
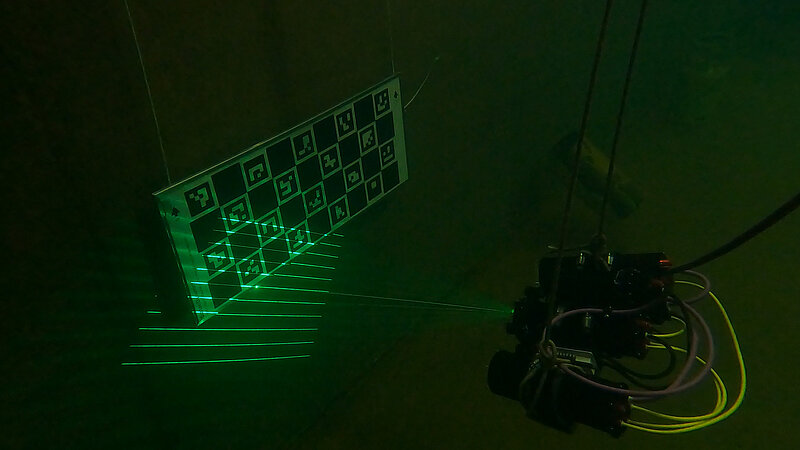
Registering and fusing 3D underwater images are challenging due to the limited field of view and the demanding measurement environment underwater. The project aims to develop new SLAM (Simultaneous Localization and Mapping) methods based on closely coupled processing of 3D data in combination with captured color images and inertial sensors. The visual and depth information of the 3D image should be simultaneously exploited for motion estimation, aiming for increased robustness of the motion estimation through combined processing.
Furthermore, the project seeks to develop a novel approach for geometric reconstruction based on implicit neural representations. In particular, AI-based algorithms are to be developed to increase the resolution of depth images and fill gaps in individual scans. This is achieved by fusing depth images with information from individual frames of the RGB camera. The advantages of Structure from Motion (SfM) will be combined with pattern projection. An open research question in the project is how the generated multimodal sensor data can be combined with the implicitly parameterized 3D model to create a multimodal 3D map of the underwater environment.
Partners