

DAEDALUS
Mission Objectives
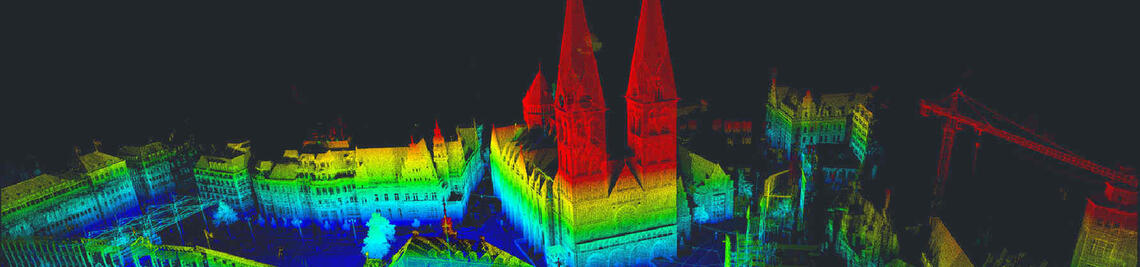
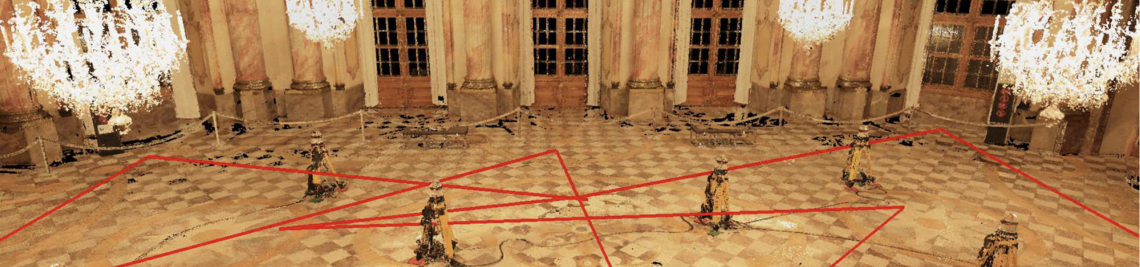
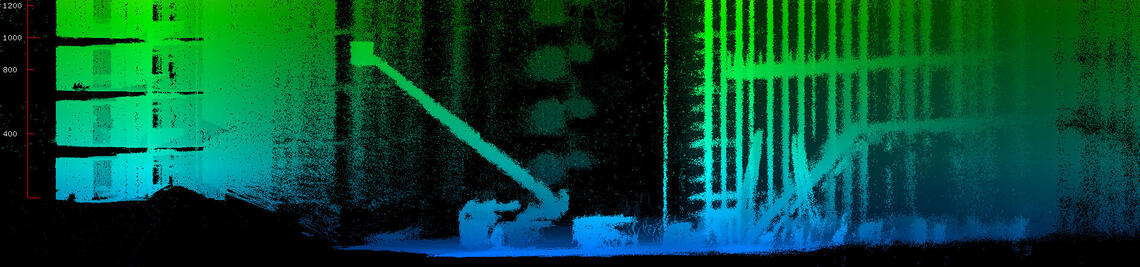
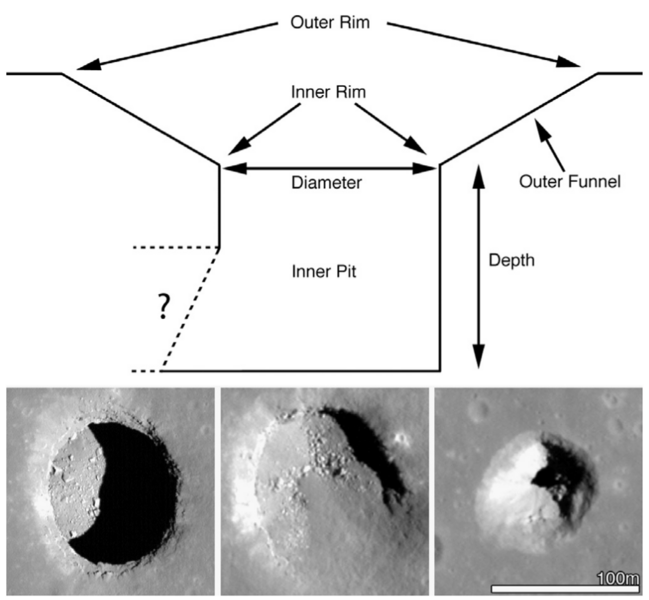
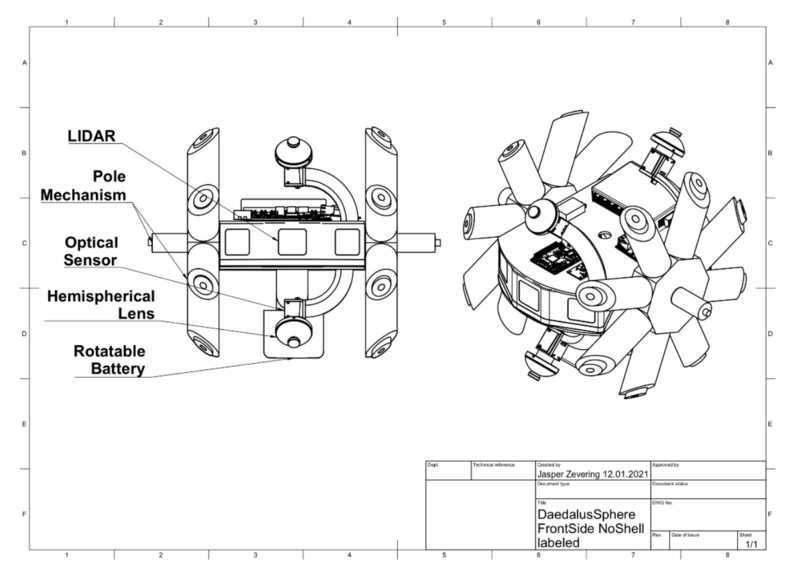
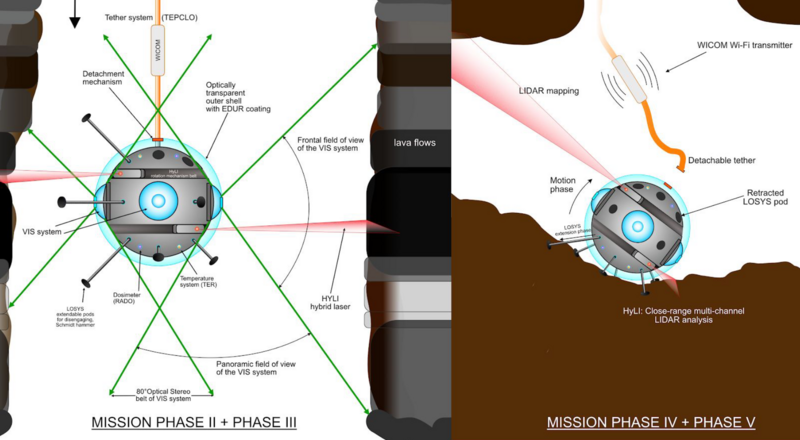
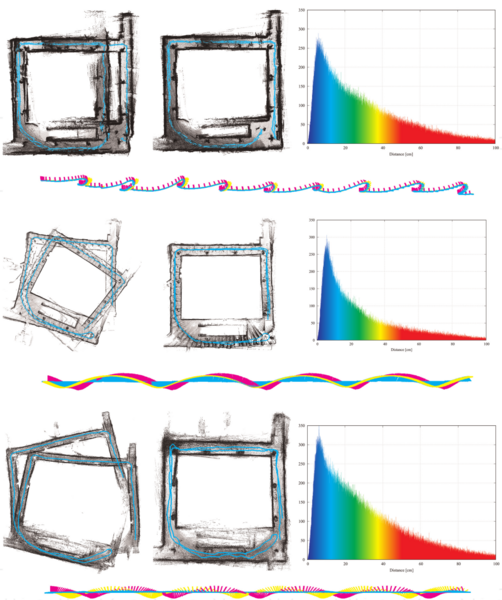
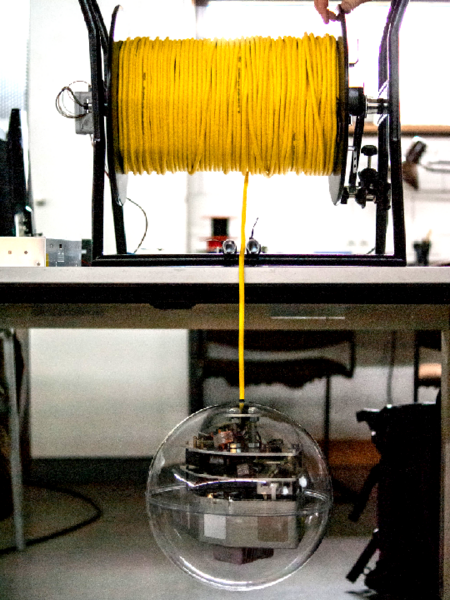
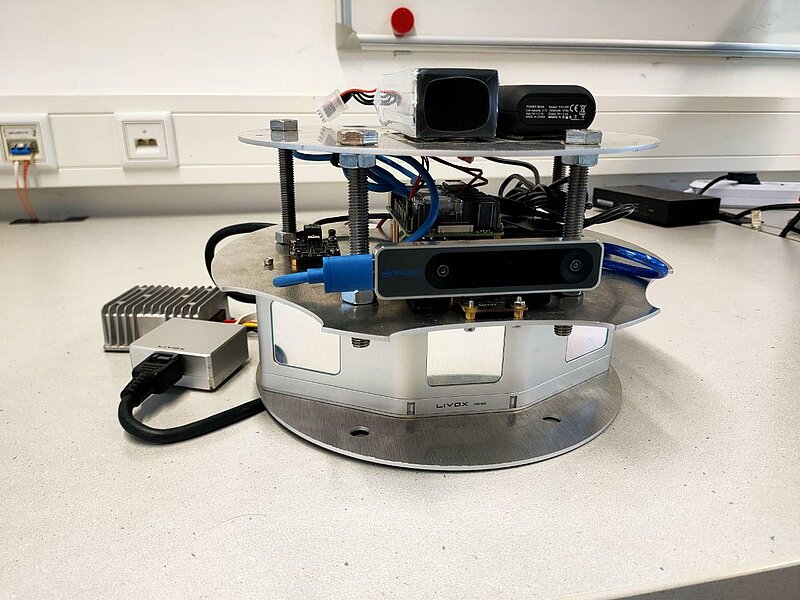
The goal of this mission is to explore hazardous and extreme environments using a compact spherical robot device equipped with a 3D LiDAR, stereo camera vision, and locomotion subsystem as well as additional auxilary housekeeping sensors. It is designed specifically with the aim of investigating underground lava tubes on the moon or on other extraterrestial domains, i.e. asteroids or planets, where high autonomy is necessary. By creating a 3D modell of the insides of those lava tubes the robot identifies potential geologic resources and characterizes environmental properties of these subsurface corridors. They might even have the possibility of inheriting stable conditions in terms of radiation and temperature, which would bring lunar or exoplanetary base-building and human settlement within our grasp.
About the project
The mission originated in the context of the DAEDALUS program of ESA (refer to "En route to exploring lunar caves" [LINK ADDRESS AT https://www.esa.int/Enabling_Support/Preparing_for_the_Future/Discovery_and_Preparation/En_route_to_exploring_lunar_caves]). It is a joint project of many institutions involved, i.e. Jacobs University of Bremen, University of Padova in Italy, and the Virtual Geographic Agency (VIGEA). The contribution of the University of Würzburg include studies and prototypes regarding LiDAR, impetus, and software of the spherical robot device. The final report can be found at DOI 10.25972/OPUS-22791. [LINK ADDRESS AT https://dx.doi.org/10.25972/OPUS-22791]
Follow-up research
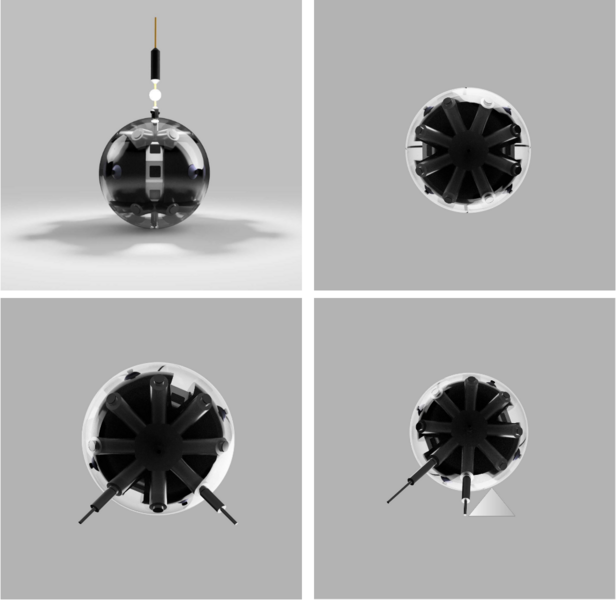
In the CDF study, a full mission was elaborated which confirmed the feasibility of spherical mapping robots for non-terrestrial exploration. After the CDF study, we further developed our existing prototypes and even built new ones. Some of this efforts have been carried out as Bachelor's and Masters theses. In fact, as spherical robot technology is still quite unexplored, our chair is always looking for students to participate in practicals or theses. There are also several publications from our chair. See the list of publications page for more info.


Consortium
The Open Space Innovation Platform (OSIP) Lunar Caves-System Study was carried out by
- Julius-Maximilians-Universität of Würzburg (JMUW, prime contractor), Germany
- Jacobs University Bremen gGmbH, Germany
- University of Padova, Italy
- INAF-Astronomical Observatory of Padova, Italy
- VIGEA – Virtual Geographic Agency, Italy

