

MUSCHEL-3D
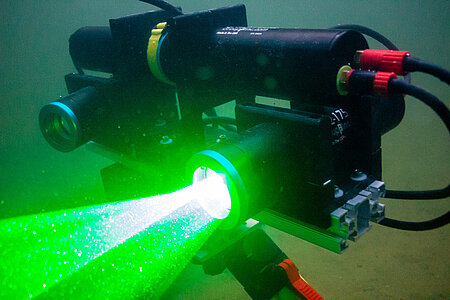
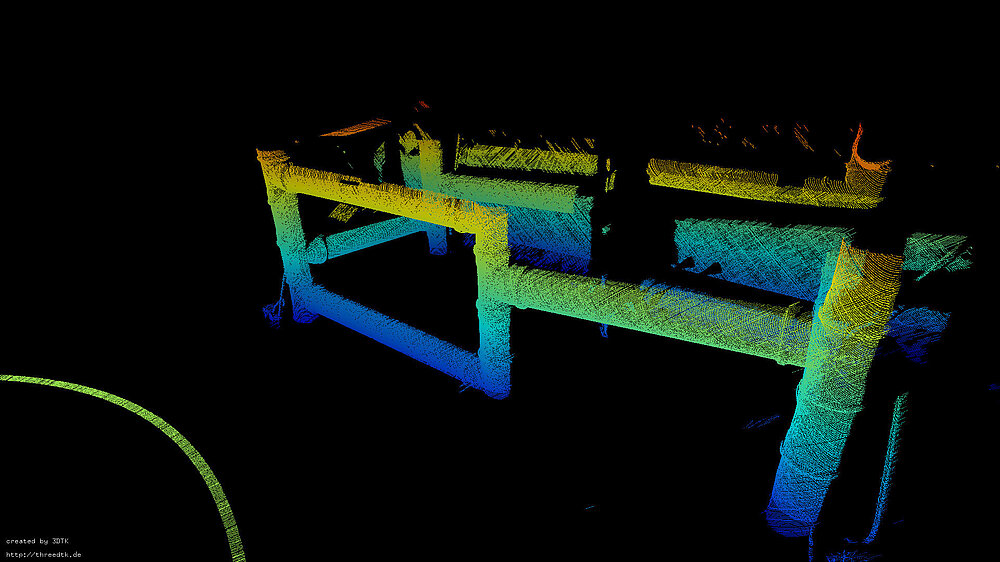
In this project the company denmal3D developed a system for mobile underwater laser scanning in inland waters from a ship. The goal was to create a functional prototype consisting of an underwater laser scanner for high-resolution 3D acquisition in water and a GNSS-based positioning system. Furthermore, procedures for the evaluation of the recorded data and optimization of the surface models were to be developed. At the end of the project it should be possible to record 3D data under water more cost-effectively with this new laser scanner technology and to open up new fields of application. For example, the technology is particularly suitable for shallow water zones in which it is difficult to record data with sonar due to multiple reflections. Furthermore, laser scanning offers a higher resolution and accuracy.
Within the scope of the project, the developed functional prototype will be tested in real application scenarios for the documentation of archaeological sites in water and the recording of technical structures such as locks, sheet pile walls or harbor walls.