

TASTSINN-VR

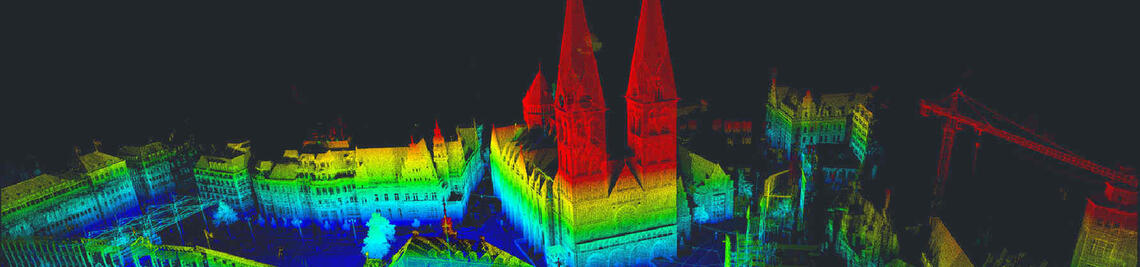
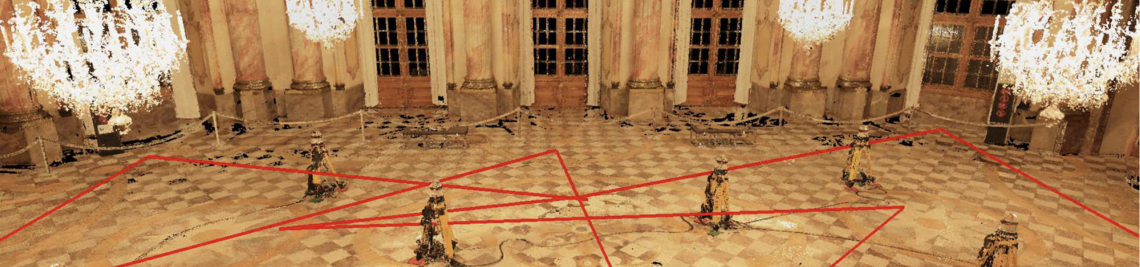
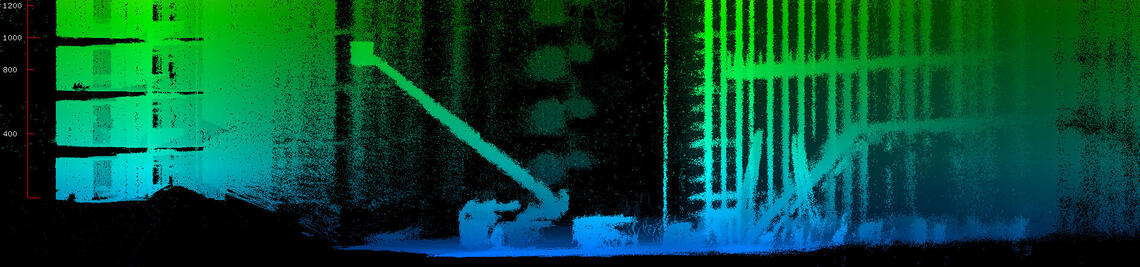
In the TASTSINN-VR project, the start-up Awesome Technologies Innovationslabor GmbH is developing a specifically adapted user interface based on virtual reality (VR) for training and remote control of mining and underwater robots. For this purpose, a haptic sensor glove made of novel elastomer sensors is developed for intuitive operation. The haptics component is thereby realized using magnetorheological fluids to enable force feedback and hand-finger tracking with a lightweight and thin glove. Since the application area of the remotely controlled machine is usually not completely visible, the sensor data is processed into 3D models using newly developed algorithms to provide the operator with the complete context that can be easily interpreted visually and experienced haptically in the VR environment. Increased efficiency in training and application leads to time and cost savings as well as better situational awareness for the remote operator.

