Physikalisch verteilte Steuerung für Weltraum 2
YETE 2 - Physikalisch verteilte Steuerung für Weltraum 2
In Zusammenarbeit mit dem Zentrum für Telematik e.V. wird das YETE Projekt aufgegriffen und erweitert. Für YETE2-SIW wird nun ein (mobiler und fliegender) Roboter entwickelt, der aus einem oder mehreren physischen Robotern besteht, die zusammenarbeiten. Dabei können die Roboter sowohl im Raum verteilt als Schwarmintelligenz handeln sowie sich zusammenschließen und als Einheit ein gestelltes Problem lösen.
Voraussetzungen dafür sind Echtzeit Übertragung von Radioprotokollen, eine globale Software, die zum einen über die Grenzen eines einzelnen Roboters steigt und zum anderen den globalen Roboter und die Bodenstation erreichen kann. Zudem muss es möglich sein, dass Kontrolle über die Roboter, Vereinbarungsprotokolle und Planung aufgeteilt werden können.
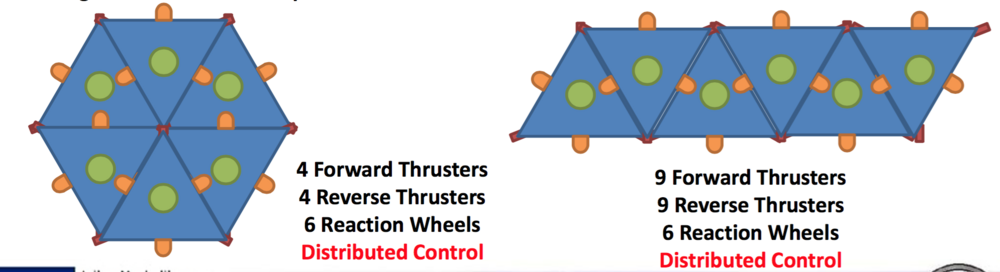
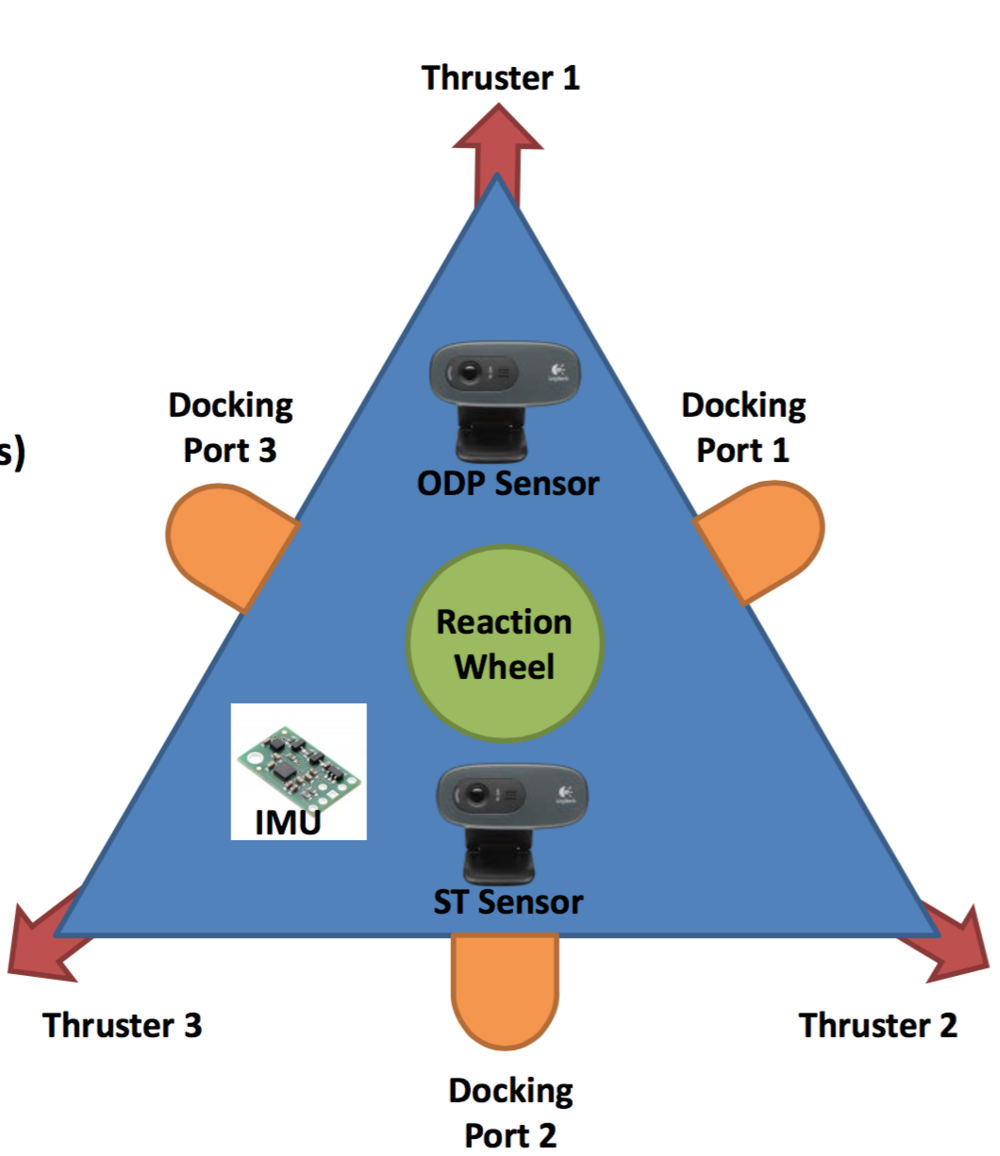
Weiterhin muss die physische Form der Roboter gewährleisten, dass das Zusammenbauen einfach und mit vielfältigen Formen ausgeführt. Hierfür bietet sich das Dreieck als Grundform an.
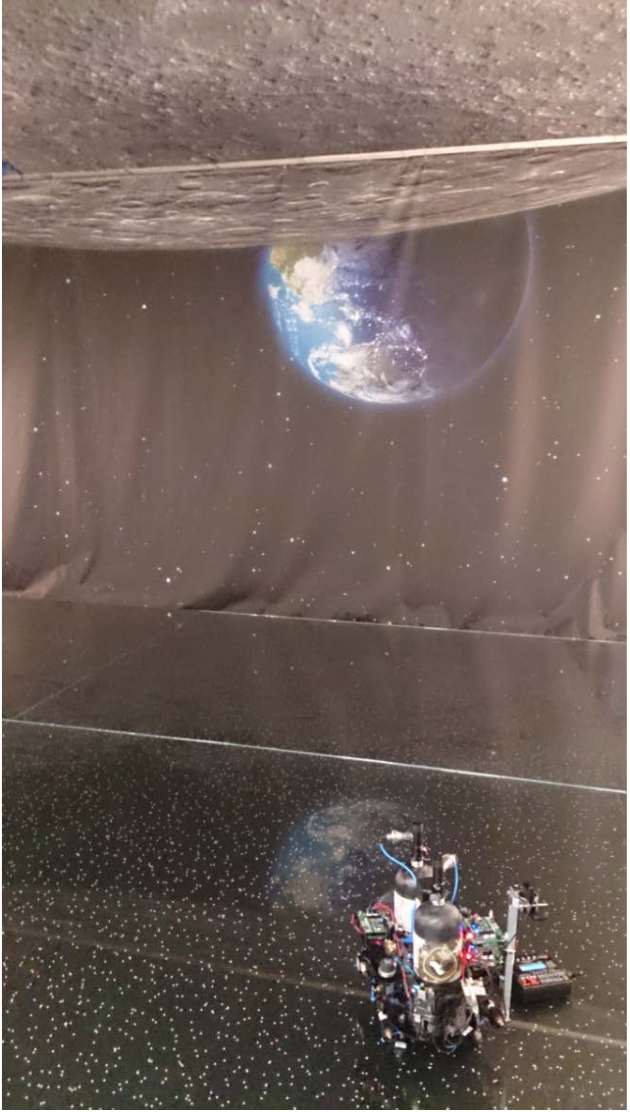
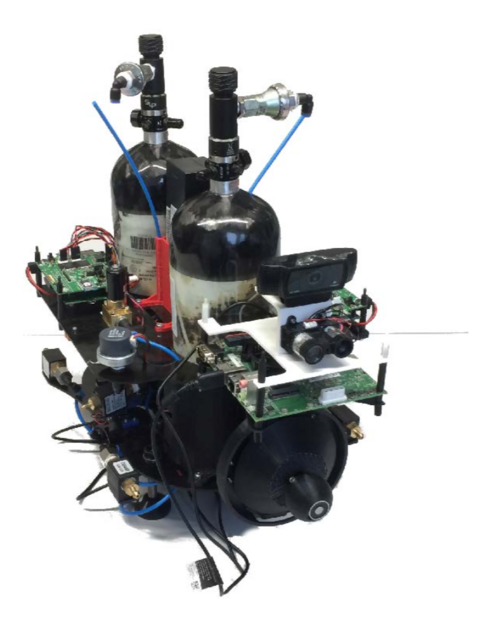
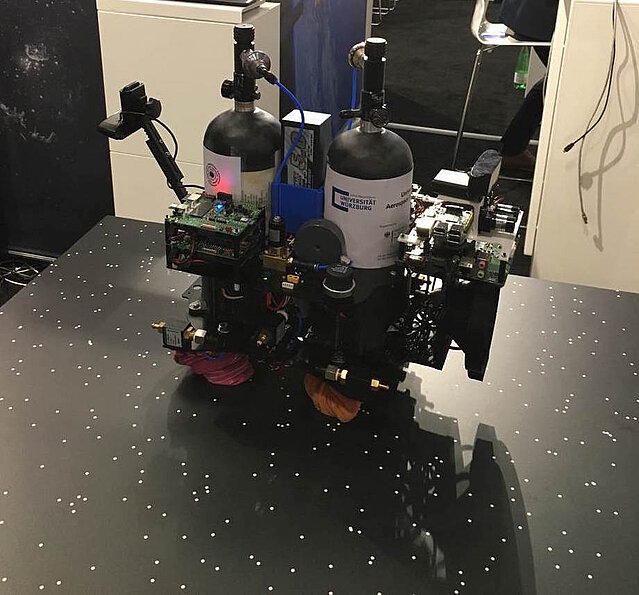
Zu Demonstrationszwecken wird ein SMS Fahrzeug konstruiert, das sich mittels Thrustern auf einer glatten Oberfläche bewegen kann. Jedes dieser Fahrzeuge besitzt dabei einen Hauptcontroller, der drahtlos mit den Aktuatoren und Sensoren kommuniziert.
Zeitraum: August 2017 bis Juli 2020