Dipl.-Ing. Nils Gageik

Research Assistant
Aerospace Information Technology
Computer Science VIII:
Department of Computer Science, Room 2.003 (Josef-Martin-Weg 52)
Julius Maximilians Universität Würzburg
Am Hubland D-97074 Würzburg
Germany
Tel.: +49-931-31-83977
Fax.: +49-931-888-81368
Email: gageik@informatik.uni-wuerzburg.de
Zusammenfassung:
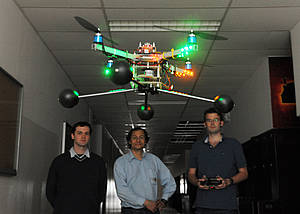
Nils Gageik ist seit November 2010 wissenschaftlicher Mitarbeiter des Lehrstuhls Informationstechnik für Luft- und Raumfahrt. Im Bereich Lehre betreut er verschiedene Veranstaltungen des Lehrstuhls als Übungsleiter. Sein Forschungsschwerpunkt ist die autonome Luftfahrtinformatik. Hier ist Herr Gageik der verantwortliche Mitarbeiter für das Projekt AQopterI8. Beim AQopterI8 Projekt wird zusammen mit Studenten an autonomen Quadrocoptern zur Innemraumerkundung erforscht, entwickelt und erprobt. Die am Lehrstuhl selbst entwickelten Drohnen waren schon einige mal in der Presse, unter anderem auch im Fernsehen auf Sat.1 Bayern und dem Bayerischen Rundfunk zu sehen. Die Arbeit wurde im April 2014 mit dem Universitätsförderpreis der Mainfränkischen Wirtschaft ausgezeichnet. Interessenten sind herzlich eingeladen Kontakt aufzunehmen.
Aufgabenschwerpunkte:
Lehre: aktueller/ehemaliger Übungsleiter in den Veranstaltungen Zentralavionik, Borddatenverarbeitung, Luft- und Raumfahrtlabor, Hardwarepraktikum Mess- und Regelungstechnik, CanSat, Space Electronics
Forschung: Autonome Quadrocopter (AQopterI8 Projekt), Teilaufgaben sind dabei Programmierung, Konstruktion, Konzeptionierung, Sensorik und Elektronik sowie Betreuung von Abschlussarbeiten (Diplom, Bachelor) und anderer studentischer Arbeiten
Netz- und Systemadmin: Betreuung des Netzwerks und des Rechnerpools (Server, etc.) des Lehrstuhls
Webmaster: Betreuung des Internet-Auftrits des AQopterI8-Projekts sowie des Lehrstuhls insgesamt
Curriculum Vitae:
seit 11/2010: Wissenschaftlicher Mitarbeiter an der Universität Würzburg (Informatik 8)
10/2010: Abschluss Computer Engineering (RWTH Aachen): Dipl.-Ing. (Fakultät Elektrotechnik und Informationstechnik)
Nils Gageik, Sergio Montenegro, Thilo Müller