
TIM & TOM
Telematics Earth Observation Mission (TOM) & Telematics International Mission (TIM)

Scope
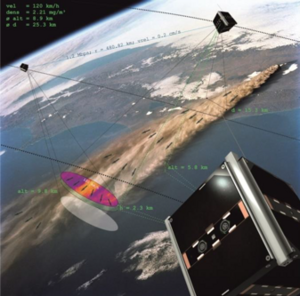
The aim of the TOM project is monitoring of volcanic eruptions that affect daily life on Earth in various ways (health, crops or the safety of air traffic). To achieve this a core of 3 nano-satellites will enable coordinated joint multispectral earth observations for generating 3-dimensional images. Images recorded on the spacecrafts must be transmitted to Earth and analyzed there. For this purpose, a ground station network consisting of the ground stations of the University of Würzburg and a network of international partners will be implemented.
One of the satellites will have a novel optical downlink, to send data to the ground in addition to its radio based communication. The other satellites communicate with each other via inter-satellite links and transfer recorded earth observation data to the ground station network. Along with experiments for earth observation also experiments in the field of communication (protocols, routing, scheduling, etc.) will be carried out.

High quality coordinated earth observation is achieved by controlling the attitude to aligning the fields of view (fov) of the satellite cameras. Currently available attitude determination tools have limitations that can be overcome by an approach up to now never used in small satellites: Visual servoing. It is a multifield approach build upon image processing and robotics. In the specific application for TOM, each satellite will analyze the currently observed scenery providing an input to update the attitude in a closed loop to keep the area of interest in the fov during the mission. Image processing consists of extracting a number of distinct features from the image, tracking and describing them for the purpose of matching. One satellite is marked as a master, apart from tracking, it shares the unique descriptors with the other Satellites. Secondary satellites process the image in an equal manner and further match the received descriptors with the locals. This way a set of features recognized by all satellites is created. The attitude is then adjusted based on the known relative image coordinates of this features to maximize the overlap of individual fovs.
Visual servoing, neglecting the feature description and matching will be utilized by the Master Satellite to potentially improve the pointing accuracy during the High-speed communication with the ground station.
The “TIM – Telematics International Mission” forms the international part of the TOM mission. This international part of the mission is lead by Zentrum für Telematik (ZfT) and supported by the university of Würzburg. TIM augments TOM by additional satellites to further increase 3-dimensional image quality by data fusion methods. The International cooperation will further increase the efficiency of the formation by adding international satellites and by building a global ground station network which can multiply the capacity of the entire system.
The project TOM is funded by the Bavarian Ministry of Economic Affairs and Media, Energy and Technology.
National Partners in TOM
- TU München
- Deutsches Zentrum für Luft- und Raumfahrt (DLR)
- Zentrum für Telematik e.V. (ZfT)
- Lehrstuhl für Informatik VIII
International Partners in TIM
- China
- Brazil
- Canada
- USA
- Upper-Austria
- South Africa
More information:
Contacts:
Interested students are welcome to join the project. We offer topics for theses, internships and student assistants. For more information, please contact.
Prof. Dr. rer. nat. Klaus Schilling schi@informatik.uni-wuerzburg.de
Prof. Dr. Andreas Nüchter andreas.nuechter@uni-wuerzburg.de
