
AsProMed-V
AsProMed-V
AsProMed-V is a joint research project comprising several institutions and companies, which is coordinated by the robot manufacturer Reis Robotics and supported by the Landesgewerbeanstalt Bayern (LGA).
Description
AsProMed-V stands for “Assistenzsysteme für die Produktion und für Medizin nahe Anwendungen - Sensorik” (assistance systems for production and medical-related fields – sensors). The core of the assistance system indicated here is a manipulator robot that is supposed to aid people in a variety of application scenarios. These range from classical deployment areas like reducing physical load on the worker in a production line by carrying heavy work pieces, or performing fast and high-precision assembling steps to increase the throughput of a work station to more innovative areas like lifting assistance for elderly people, or even being used as a rehabilitation device, where a patient can use the robot as a training tool, doing predefined movements and exercises with varying forces with the robot.
All these different application scenarios result in a great number of potential users of the system, most of which will not have experience in robotics. Thus, the focus on this project is on the user input devices, interface and the sensors of the system, to create intuitive and dependable ways of controlling the robot and enabling the necessary safety to allow for working in its direct surroundings. Part of the developed system will be a VR/AR-interface (Virtual/Augmented Reality), which allows for an elegant and intuitive way of presenting data from the robotic system to the user. The feedback from a robot can often be complex and difficult to understand especially for novice users; AR allows them to see this information directly in their known working environment, thus not requiring any interpretation of the supplied data.
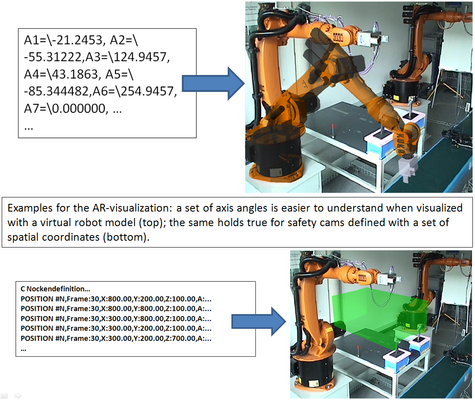
Besides implicit representation of machine data sets, also the complex operational sequences of the assistant manipulator can be visualized. The goal of the VR/AR-user interface is making the user understand the robot better, thus raising his trust to the device and eventually seeing the manipulator not as a machine, but rather as a colleague in his working duties.
News Articles
[25.09.2010] Frankfurter Allgemeine Zeitung, Main Echo Zeitung
Links
Project Partners






