Indoor Merlin
Description
The indoor Merlin (Mobile Experimental Robot for Localization and Intelligent Navigation) adopts front-wheel steerable, rear-wheel drive car-like vehicle model, which is the same as the outdoor Merlin. A variety of sensors onboard indoor Merlin makes it suitable for laboratory experiments under simple ground conditions. For instance, encoders and gyroscope provide adequate measurements of motion in a plane. The laser range finder gives the possibility to detect the environmental conditions around the robot. Furthermore, the vehicle is equipped with a stack of PC/104 modules, which makes it possible for the high-level computations and the integration of a wireless adapter.

Scientific Applications
Ongoing research topics concerning indoor Merlin include: path planning, obstacle avoidance, automatic path tracking, cooperative behaviors (e.g. rendezvous, search and rescue), teleoperation via wireless network, dynamic convoy protection etc.
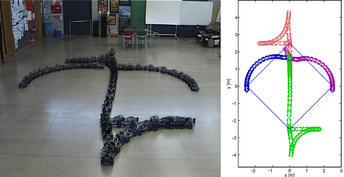
A broad range of applications of robotic formation has been emphasized by plenty of researchers in the related fields for a long period of time. Some concrete studies have been performed by our former colleagues to achieve cooperative behaviors with high autonomy. For instance, Dr. M. Hess has successfully finished his doctoral work by achieving the autonomous rendezvous of a group of indoor Merlins (figure above) and the exemplary scenario for snow shoveling in the Frankfurt (am Main) Airport .
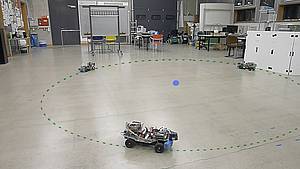
Another research direction of robot formation at our chair focuses on distributed optimization, which is illustrated through a dynamic Convoy Protection scenario (figure below). The mobile robots are driving in a circular formation, while trying to keep the object of interest in the middle. Optimization framework based on Model Predictive Control (MPC) provides straightforward control algorithms to automate the robot’s motion according to desired behaviors and requirements.