
BayKoSM

The BayKoSM project is a cooperation of several universities and companies in Bavaria. The aim of the project is the development of key technologies for swarms of mobile vehicles. These swarms consist of either nano-satellites or small drones.
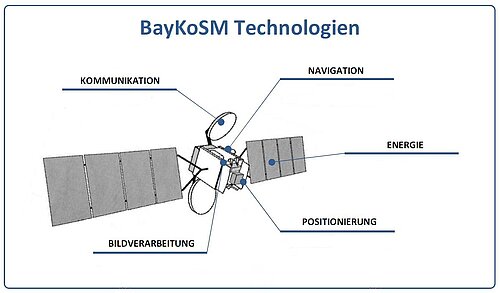
There are five key technologies which will be investigated to realize autonomous swarms:
- Autonomous navigation of vehicles in teams
- Ad-Hoc communication for vehicles
- Power generation with temperature gradients
- Positioning via Galileo signals
- On-board Image Processing
Contacts:
For detailed information about the BayKoSM project, please contact: Prof. Dr. Klaus Schilling
