SiNafaR
Safe Navigation for Autonomous Robot Systems
Novel GNSS receivers allow reliable navigation for heterogeneous networks of cooperating robot systems. Currently, well trained operators and high resource employment are necessary to ensure a secure teleoperation of aerial and ground vehicles, though. Since the evaluation of the performance and the quality of the available navigation information are not determinable during runtime, a robust and reliable (semi) autonomous operation of the robot systems is mostly not possible.
Description
The objective of the research project SiNafaR (“Safe Navigation for Autonomous Robot Systems”) is to work on these problems in order to find solutions that build the foundation for a secure operation of heterogeneous robot systems in future.
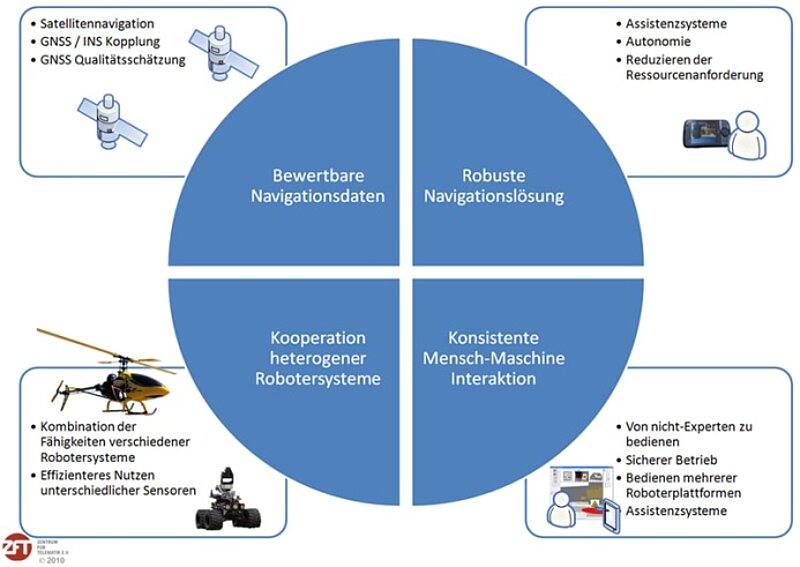
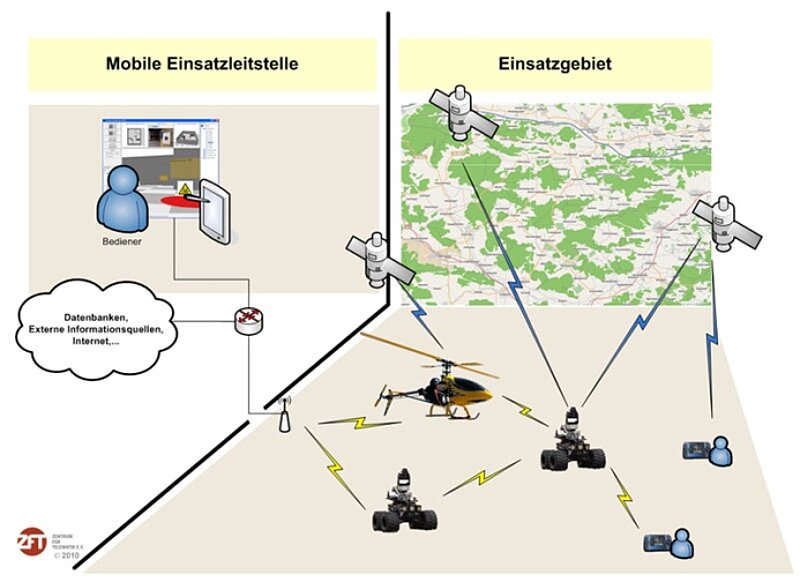
In order to achieve the objective of a secure operation of heterogeneous robot systems, four important aspects are investigated in the context of the project “SiNafaR” – Evaluation of the quality of GNSS data; Robust navigation solutions; cooperation of heterogeneous robot systems ; Consistent Human-Machine interaction. The combination of these aspects will lead to novel solutions for autonomy and assistance functions of aerial and ground vehicles, which allow cooperation between different types of robots based on reliable satellite navigation.
Contact
For more details or information regarding internships/thesis/jobs, please contact Robin Hess
Partners